You Only Touch Once: 6-DoF Object Pose Estimation from Single Tactile Contact
arXiv:2606.28899v1 Announce Type: new Abstract: Accurate 6-DoF object pose estimation is fundamental to robotic manipulation, yet vision-based methods often fail under occlusion, poor lighting, and reflective or transparent surfaces. We present YOTO, a tactile-only pose estimation system that recovers the full 6-DoF object pose from a single pair of simultaneous contacts, without requiring contact history. YOTO represents each tactile contact as a local 3D point cloud and localizes it on the obj...
arXiv cs.RO
·Pengfei Ye, Yuxiang Ma, Haonan Chen, Guangming Wang, Yixiong Jing, Brian Sheil, Yilun Du, Edward Adelson
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
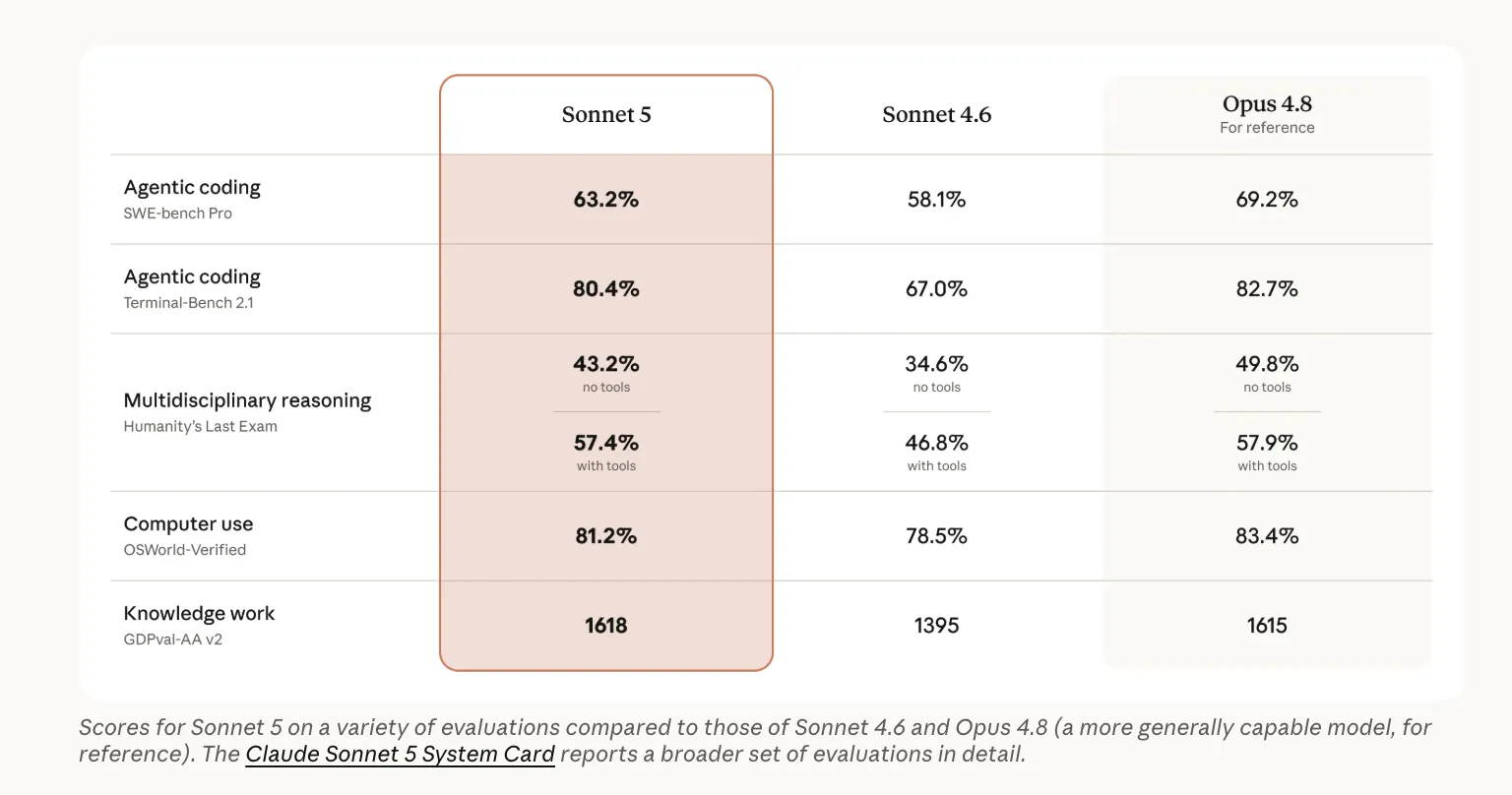
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
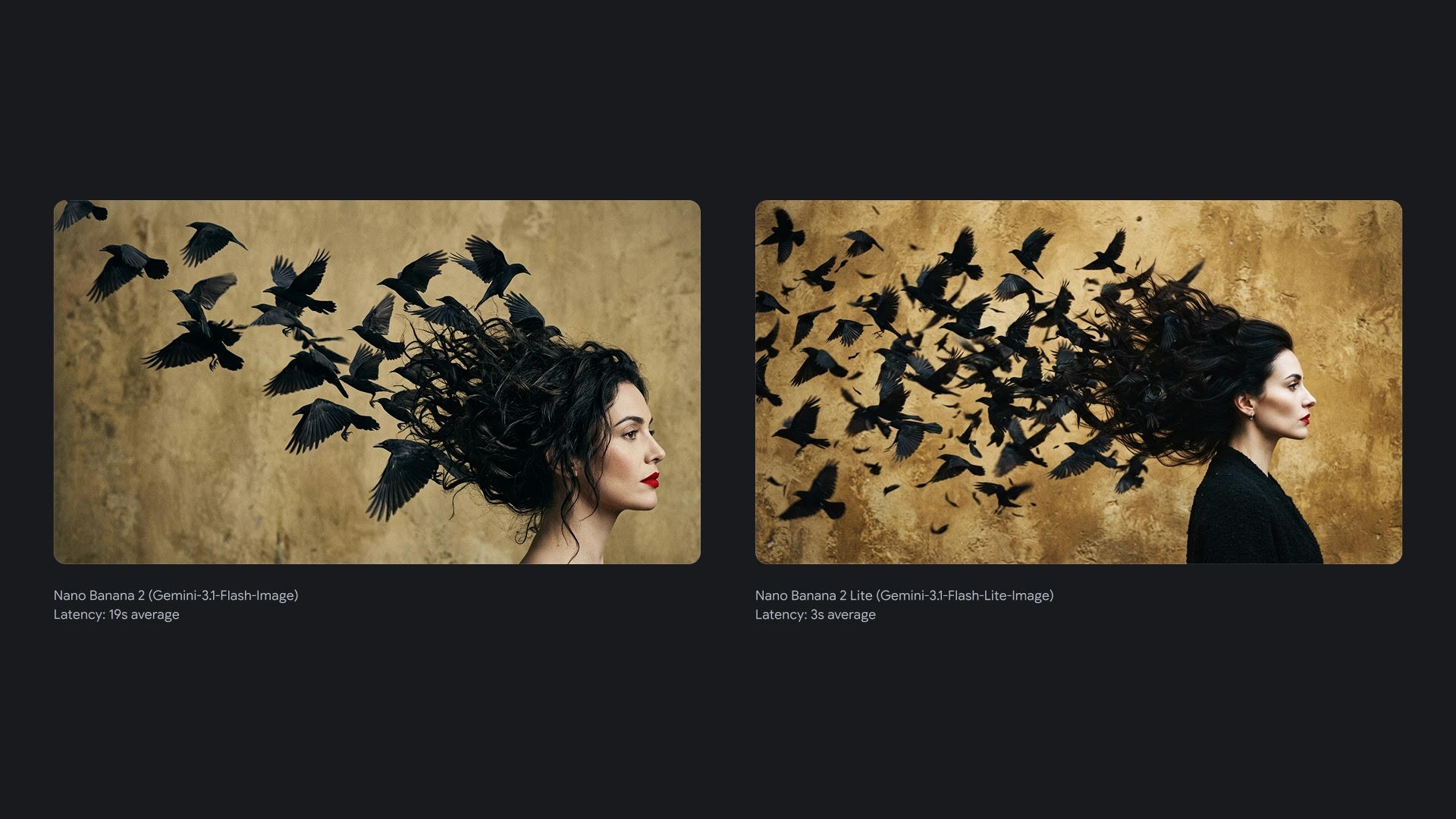
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog