Blog
Robótica & RL
When Stopping Fails: Rethinking Minimal Risk Conditions through Human-Interactive Autonomous Driving for Safe Transportation Systems
arXiv:2606.29115v1 Announce Type: new Abstract: Autonomous vehicles (AVs) are increasingly deployed in urban environments, yet their safety frameworks remain primarily designed around collision avoidance and minimal risk condition (MRC) behaviors such as slowing or stopping when uncertainty arises. Although effective in reducing immediate crash risk, real-world deployments indicate that stopping alone does not guarantee safe integration into human-governed roadway systems. Incidents reported by ...
arXiv cs.RO
·Yash Tandon, Giovanni Tapia Lopez, Marcus Blennemann, Mohan Trivedi, Ross Greer
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
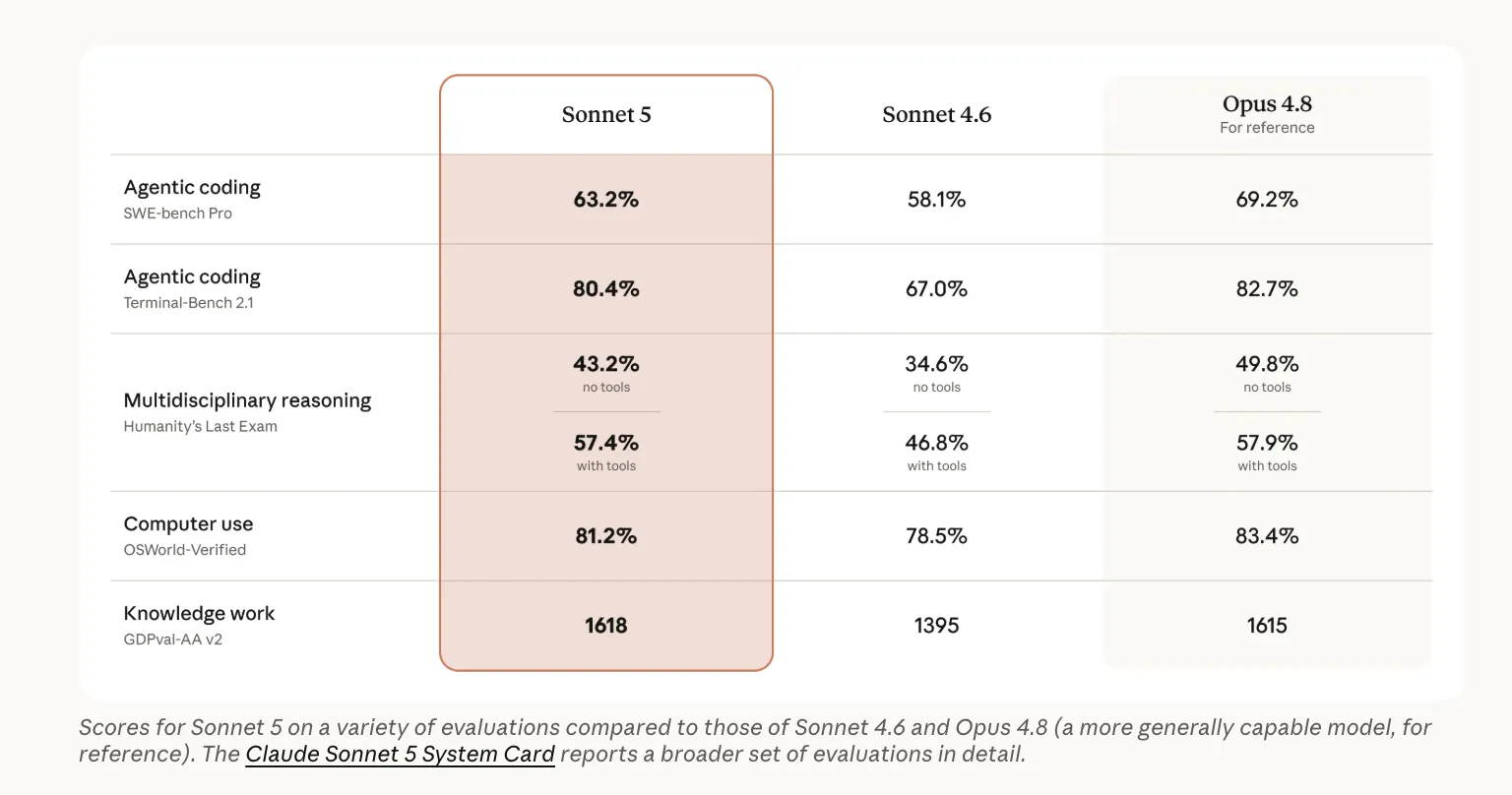
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
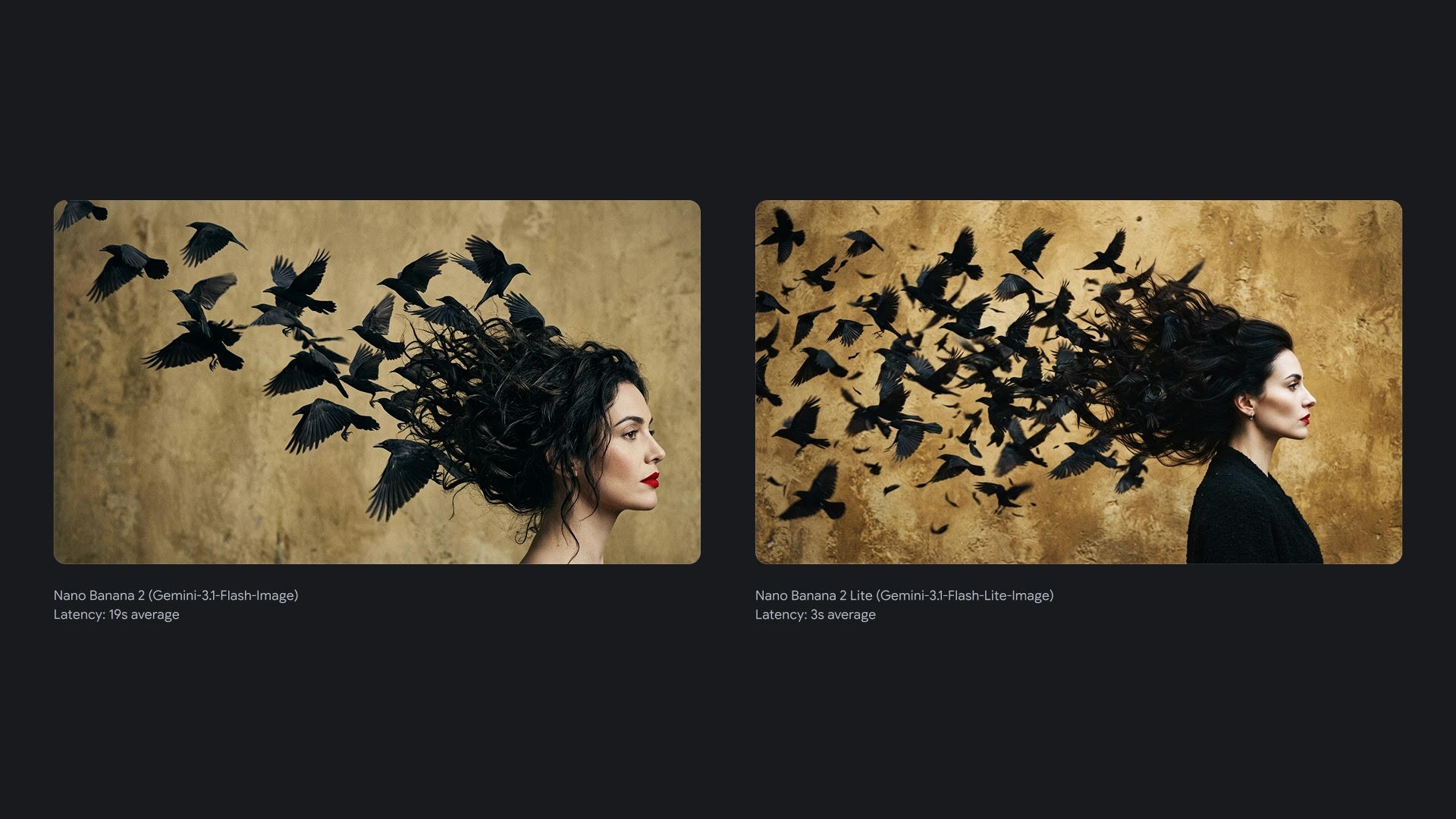
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog