The Speedup Paradox: Rethinking Inference Speed-Quality Trade-off in Embodied Tasks
arXiv:2606.28529v1 Announce Type: new Abstract: Embodied foundation models have recently been widely used to improve robot generalization and task success rates. Previous works apply lossy efficient-inference techniques such as quantization, pruning, and asynchronous inference, accepting small action quality degradation in exchange for lower per-step computation cost and inter-action latency. However, unlike traditional static ML tasks, embodied tasks involve repeated interaction with the enviro...
arXiv cs.RO
·Yujin Wang, Junli Chen, Yixuan Li, Shunan Dong, Huazhong Yang, Yongpan Liu, Hongyang Jia
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
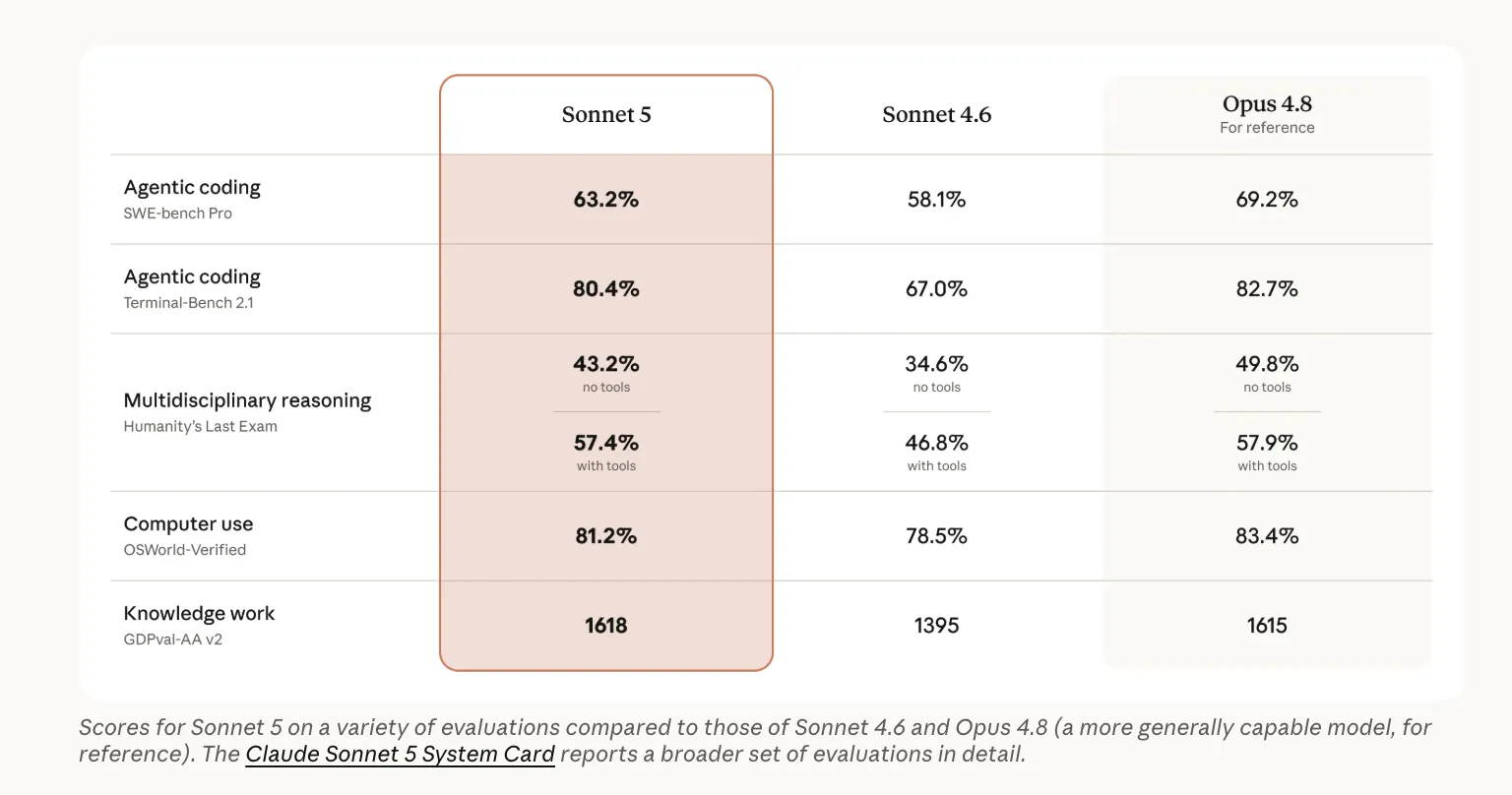
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
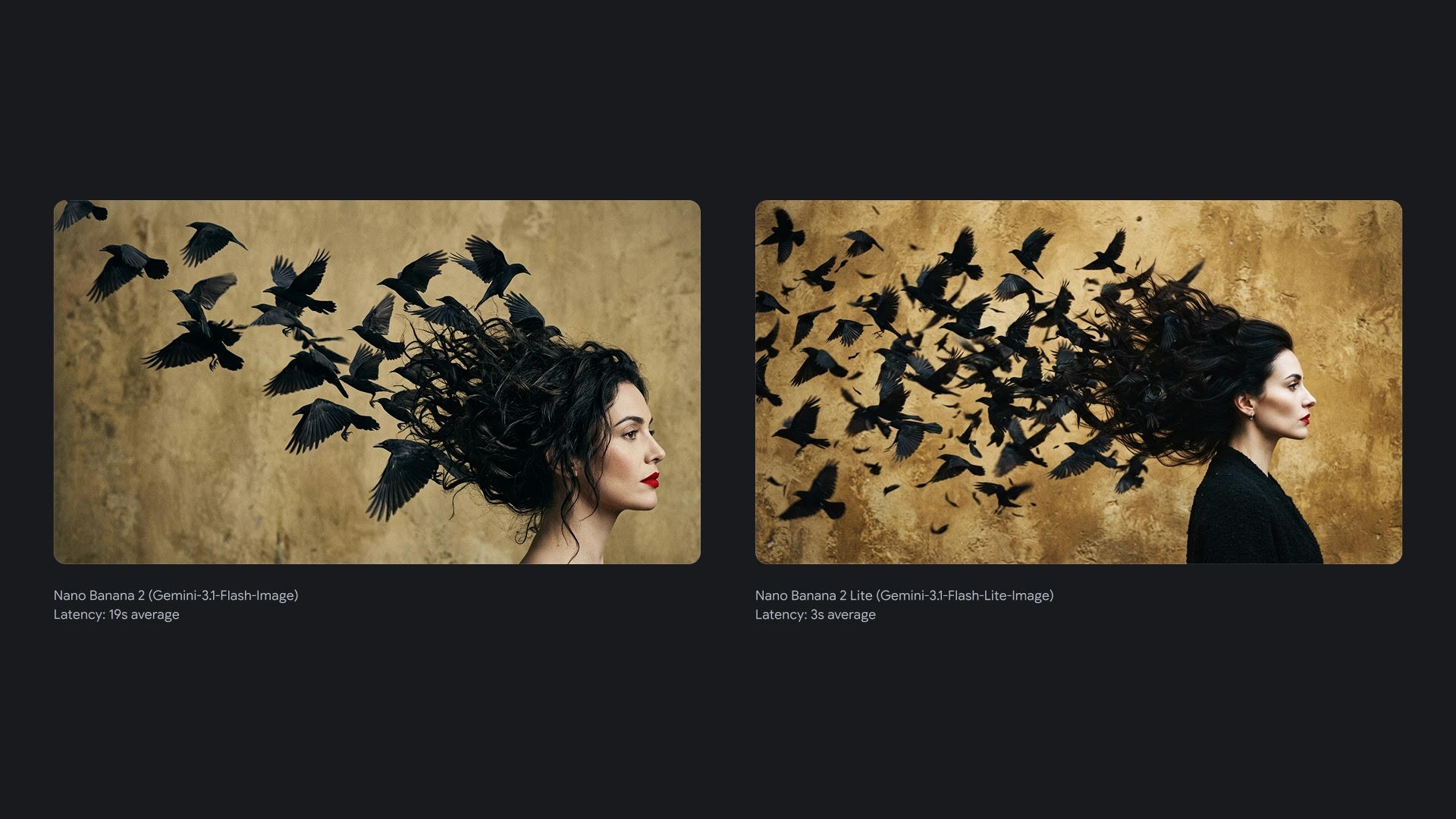
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog