Robotic Arm-Based Spectral Sensing for Strawberry Positioning and Non-Destructive Sweetness Measurement
arXiv:2606.28555v1 Announce Type: new Abstract: Accurate assessment of sweetness is essential for quality control in agriculture, yet conventional methods rely on destructive sampling and are difficult to scale. This thesis presents a robotic arm-based spectral sensing system for strawberry detection, localization, approach, and non-destructive sweetness estimation. The system integrates perception, calibration, and robotic control in a closed-loop pipeline. A YOLOv11s detector is adopted for re...
arXiv cs.RO
·Yi Yang, Mark Cardamis, Wen Hu
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
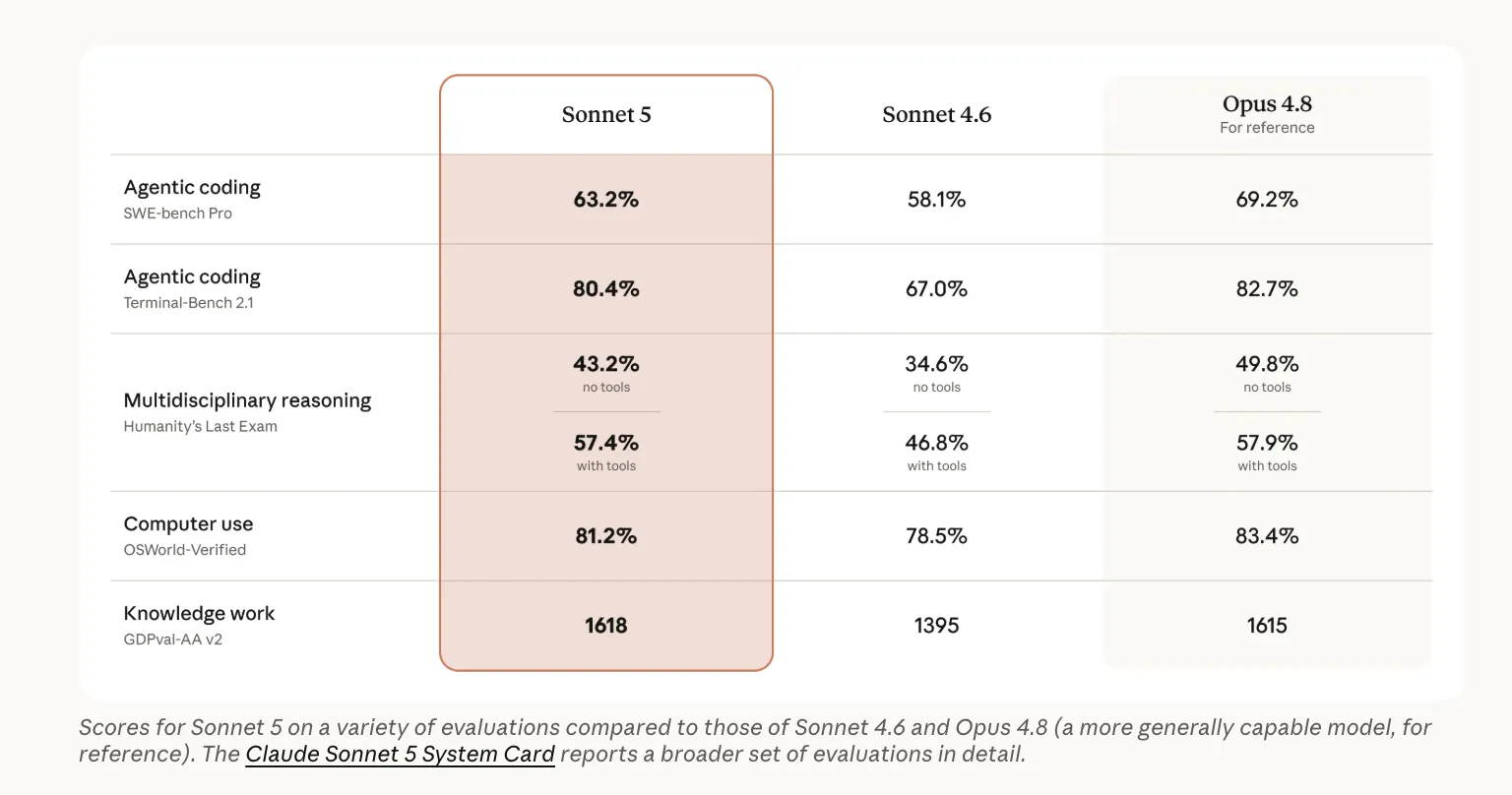
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
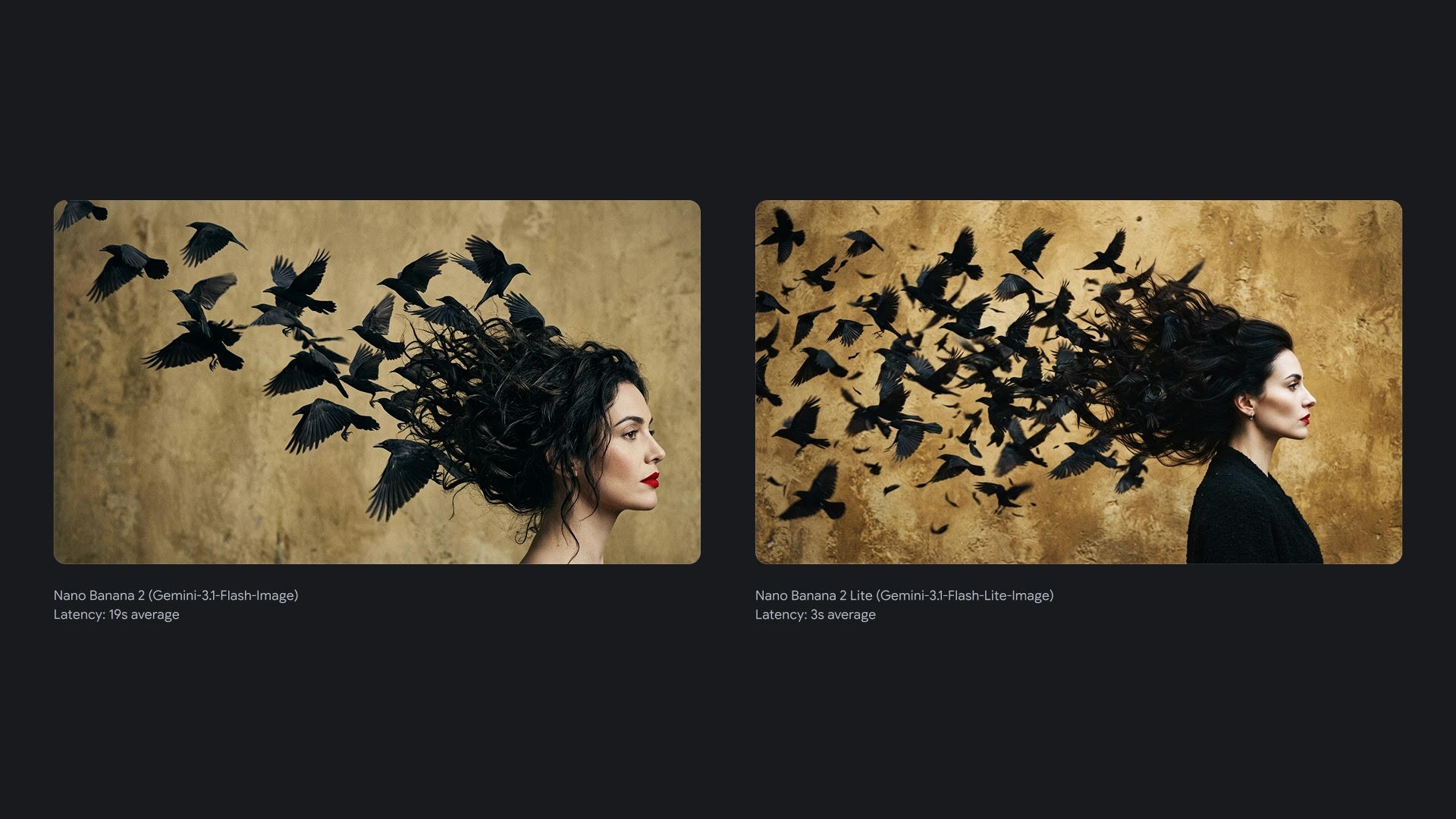
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog