Blog
Robótica & RL
Physics Models for Sim-to-Real Transfer in Professional-Level Robot Table Tennis
arXiv:2606.28805v1 Announce Type: new Abstract: At competitive speeds and spins, a table tennis ball follows complex, counterintuitive trajectories that a robot must track and precisely counter within fractions of a second. Training a reinforcement learning policy capable of these skills is prohibitively expensive and dangerous in the real world, making high-fidelity simulation essential. Transferability of such policies, however, critically depends on how faithfully the simulation captures real...
arXiv cs.RO
·Christian Conti (Sony AI, Tokyo, Japan), Bilan Yang (Sony AI, Tokyo, Japan), Alexander Sigrist (Sony AI, Zurich, Switzerland), Lorenzo Miele (Sony AI, Zurich, Switzerland), Yamen Saraiji (Sony AI, Tokyo, Japan), Peter D\"urr (Sony AI, Zurich, Switzerland), Naoya Takahashi (Sony AI, Zurich, Switzerland)
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
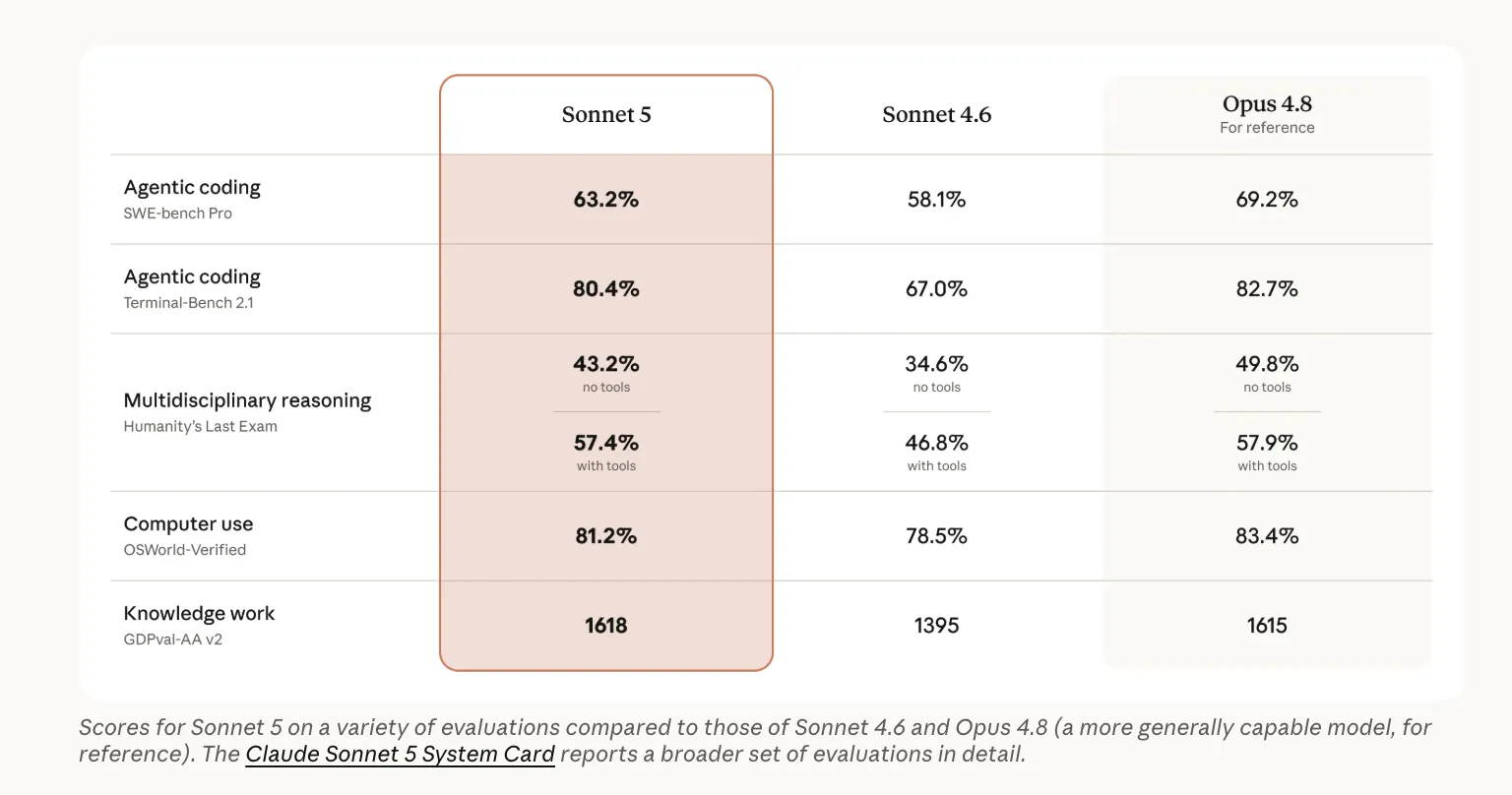
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
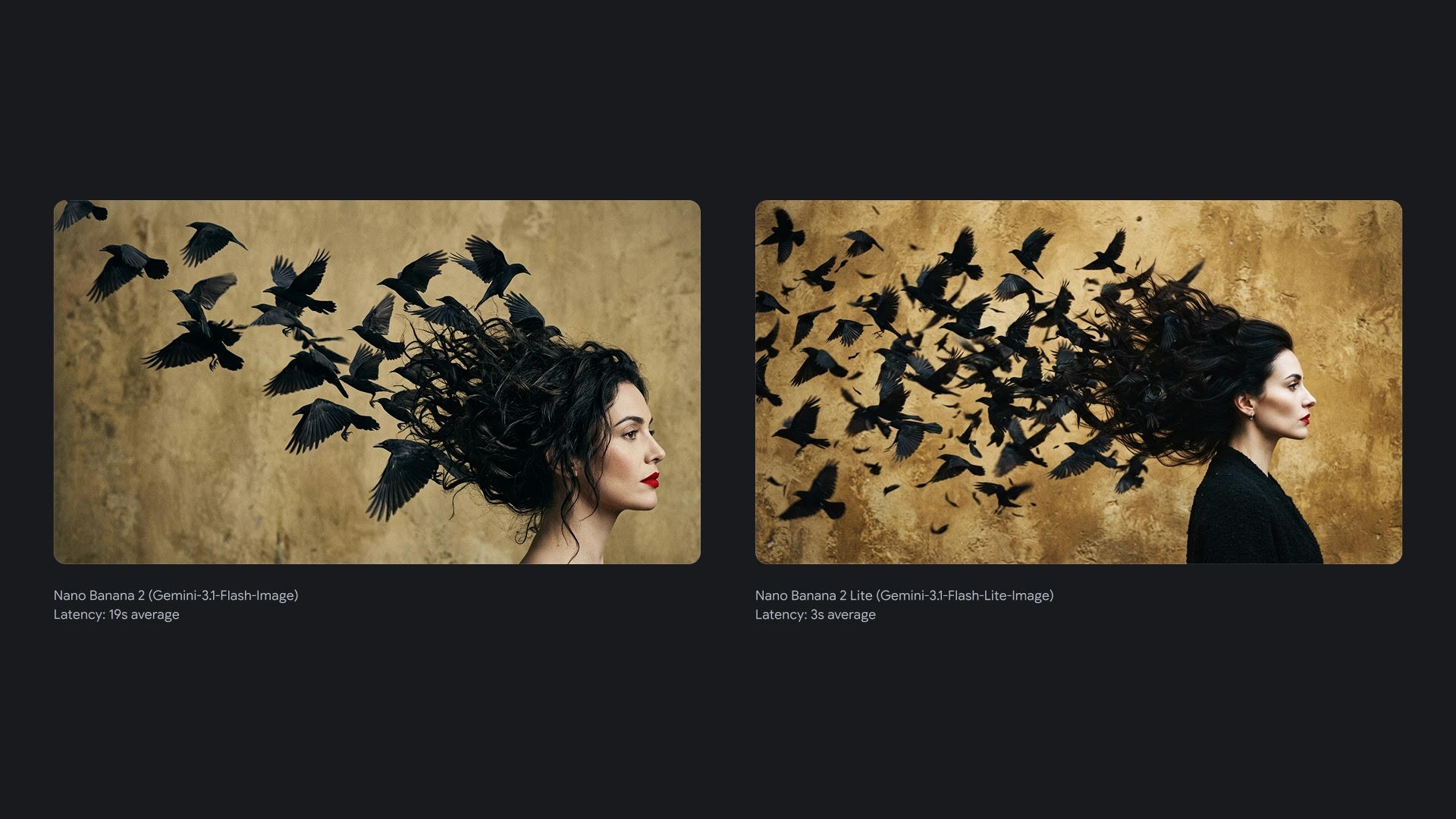
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog