Blog
Robótica & RL
Multi-Contact Force Estimation for Continuum Robots via Gaussian-Parameterized Factor Graphs
arXiv:2606.29165v1 Announce Type: new Abstract: Continuum robots offer key advantages in navigating unstructured environments, but their safe operation requires accurate estimation of the external contact forces acting anywhere along the robot body. Estimating these forces at unknown locations is an ill-conditioned problem, particularly for multiple contacts. We propose a unified shape and force estimation framework formulated on a factor graph. By incorporating a Gaussian mixture force paramete...
arXiv cs.RO
·Aditya Prakash, Panagiotis Tsiotras
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
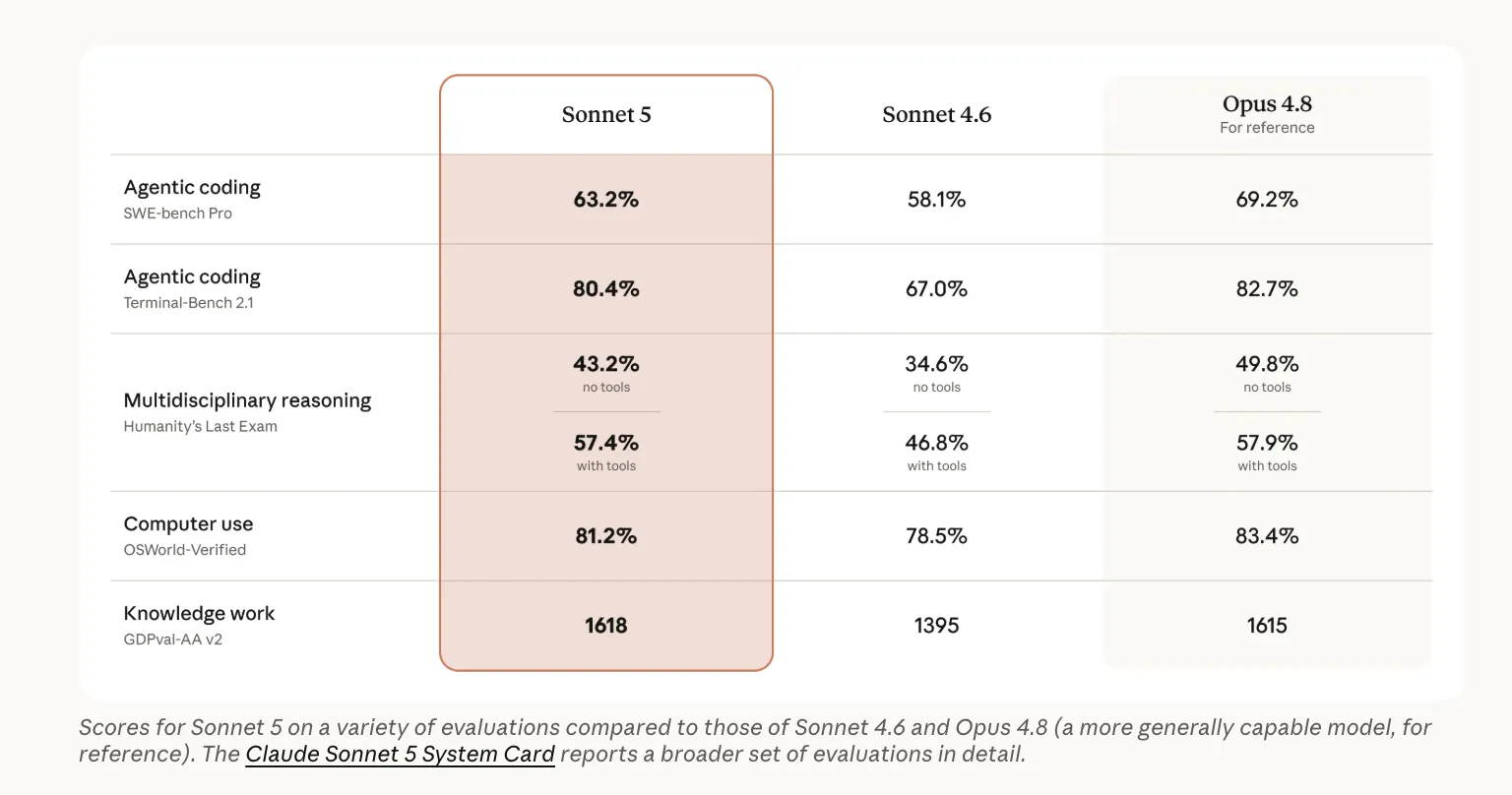
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
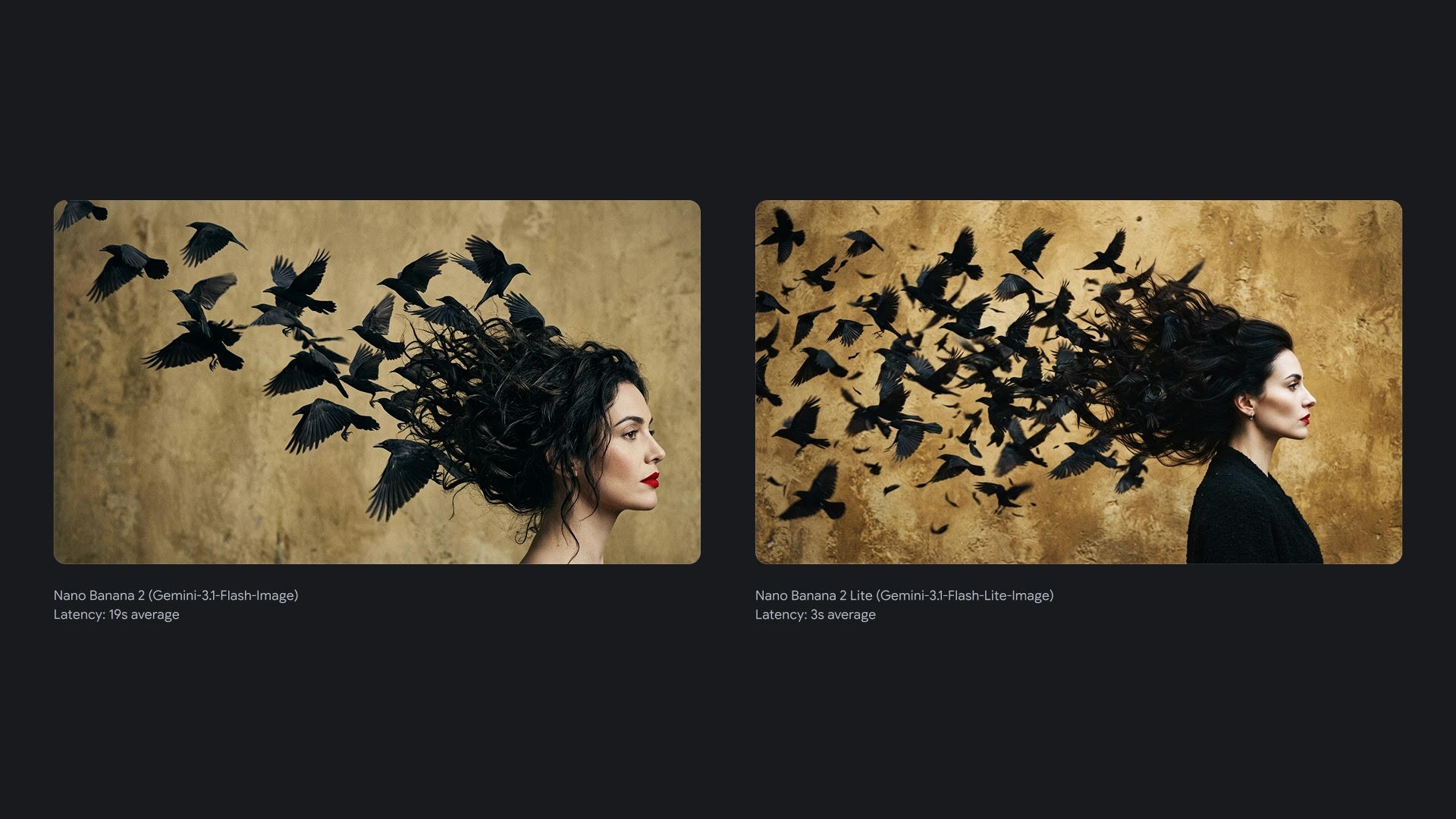
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog