Blog
Robótica & RL
LNN-Fly: Continuous-Time UAV Navigation for Robust Obstacle Avoidance under Timing Mismatch
arXiv:2606.28827v1 Announce Type: new Abstract: End-to-end unmanned aerial vehicle (UAV) navigation can achieve impressive agility in simulation, yet its obstacle-avoidance behavior often degrades after deployment because the policy must tolerate simulator mismatch, sensing irregularity, and variable-rate control. These effects are especially dangerous in cluttered environments, where stale observations or short control irregularities can directly lead to collisions. We present LNN-Fly, a deploy...
arXiv cs.RO
·Yulin Huang, Shaojie Chen, Di Feng, Jiahao Wang, Ping Liu, Jianxiao Zou
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
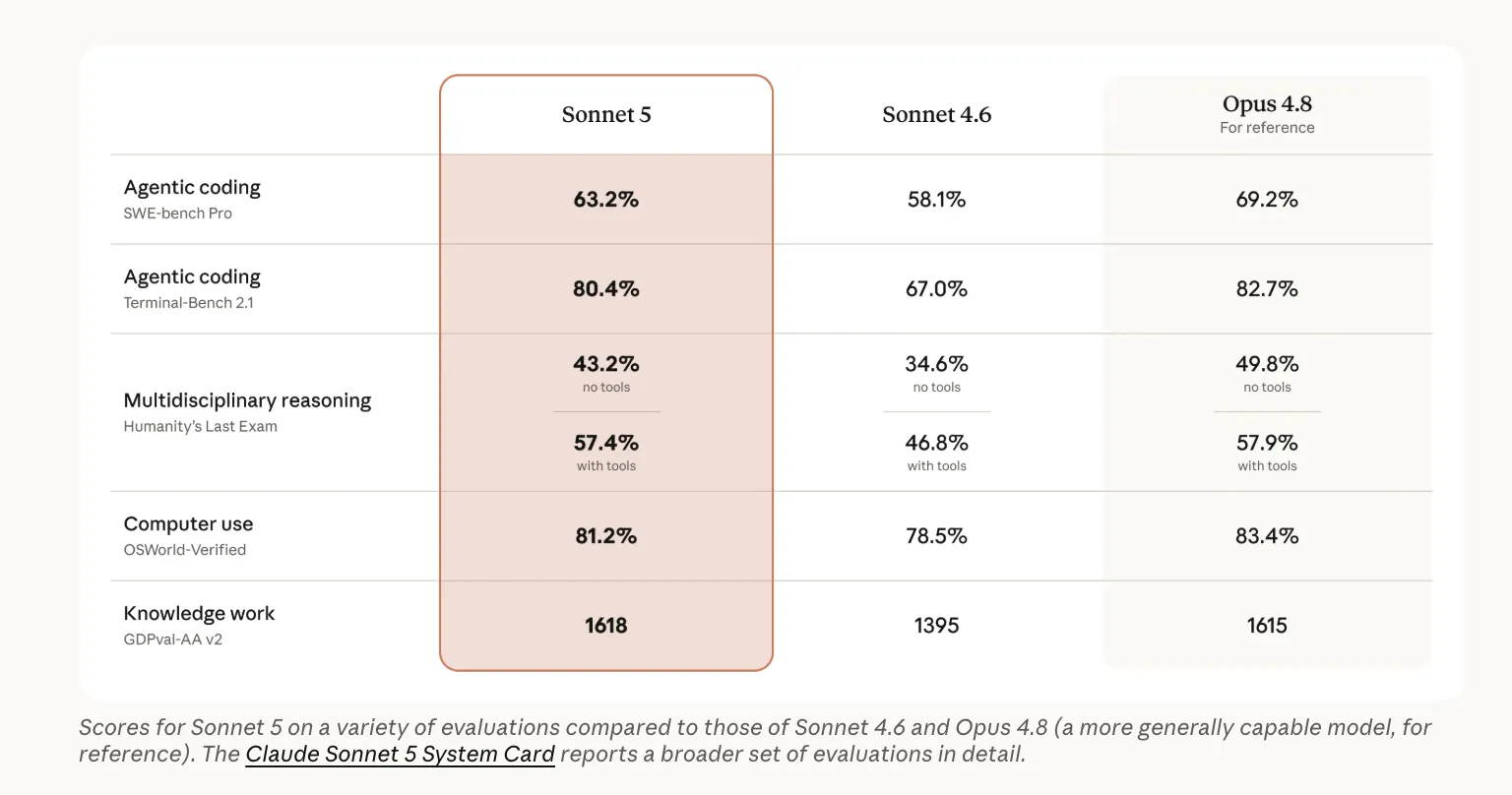
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
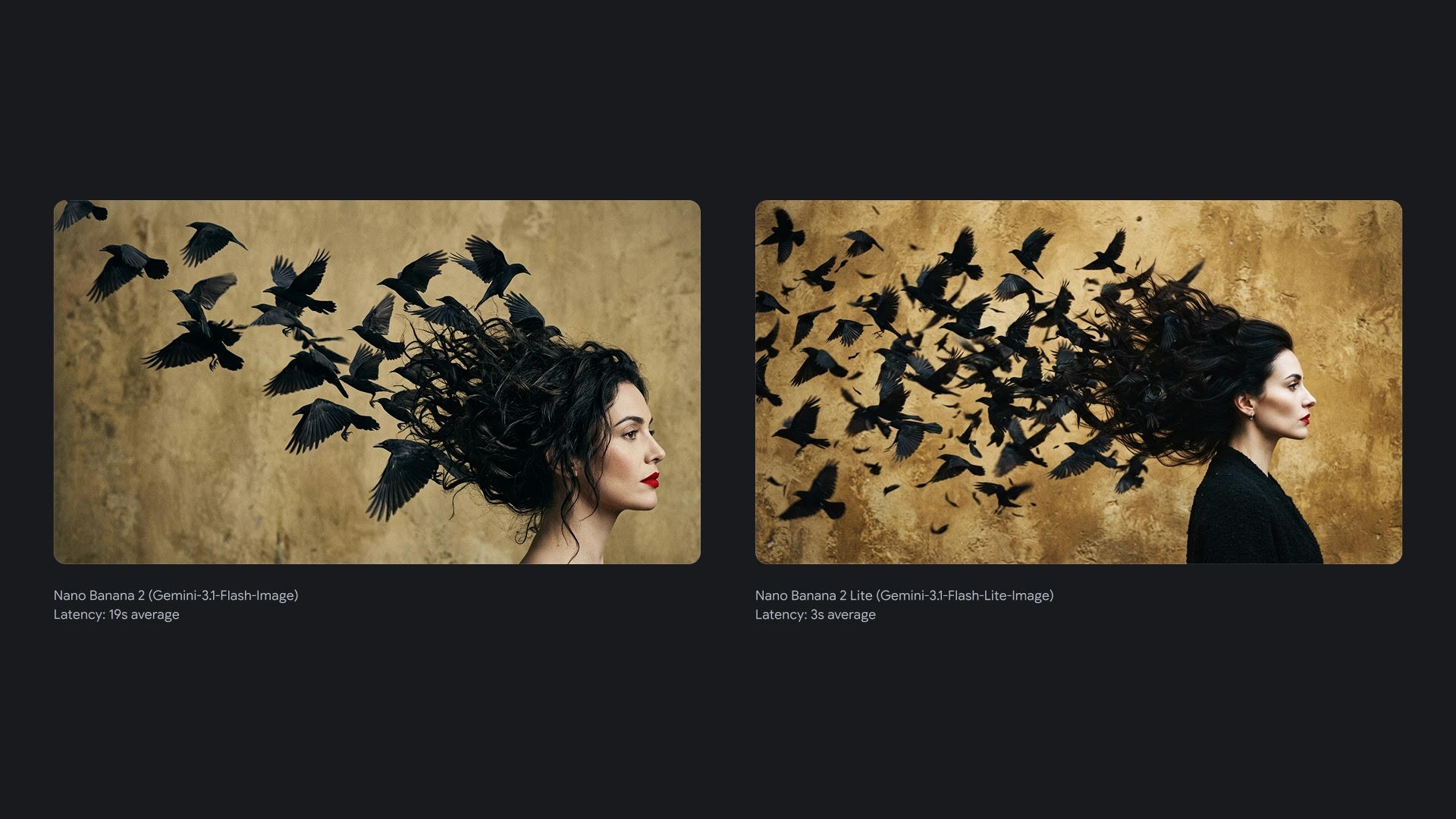
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog