Blog
Robótica & RL
J-LAW: Joint Localization and Actionable World Modeling via Coupled Latent Factor Graphs
arXiv:2606.28712v1 Announce Type: new Abstract: Classical SLAM estimates metric poses and a geometric map but produces no actionable predictive model for planning. Action-conditioned world models learn compact latent dynamics for planning but ignore global metric consistency and accumulate drift under open-loop rollout. We argue these are two views of the same estimation problem and propose J-LAW (Joint Localization and Actionable World Modeling) in this letter: a coupled factor graph that joint...
arXiv cs.RO
·Guanqun Cao, Liang Chen
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
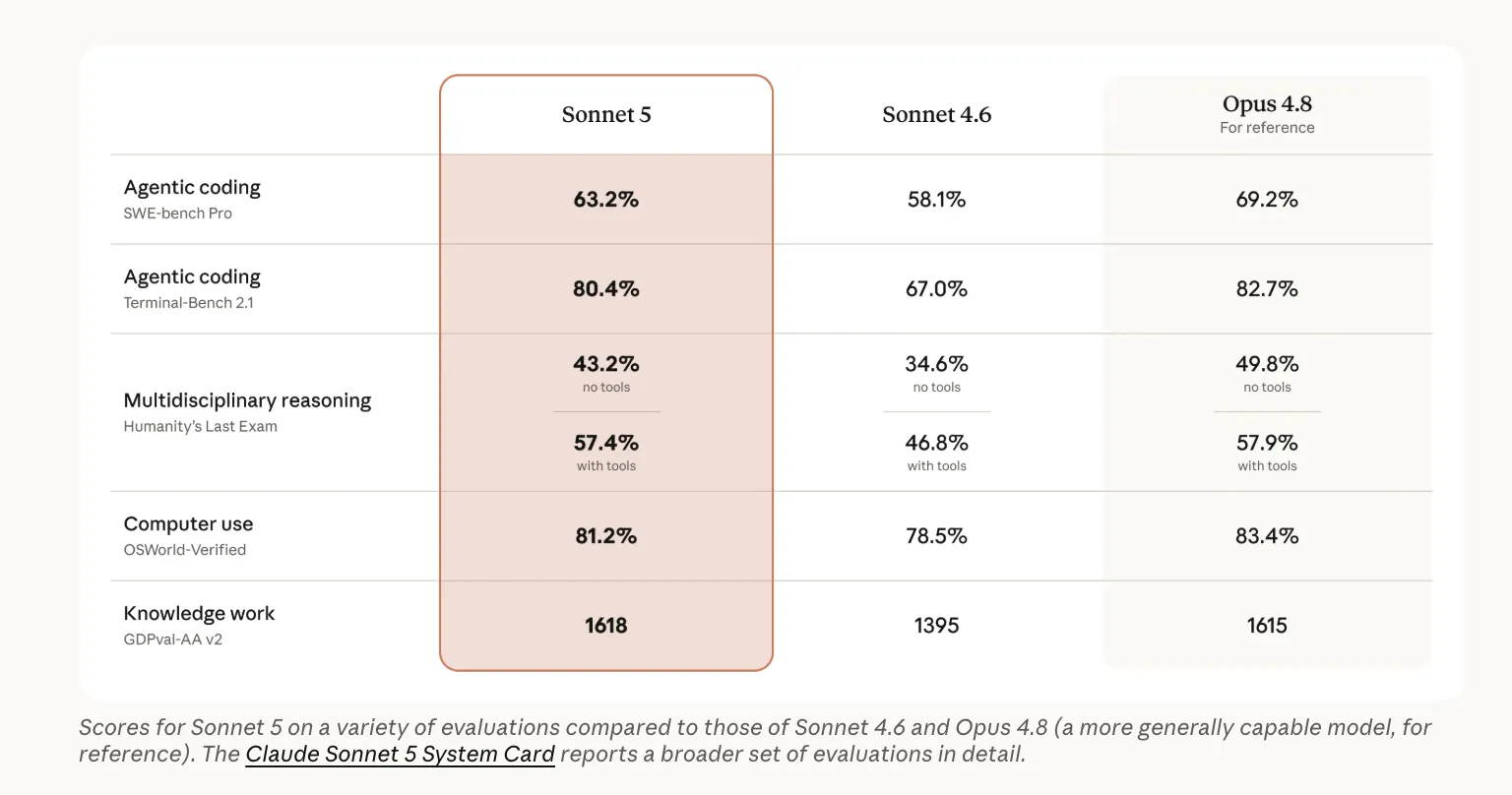
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
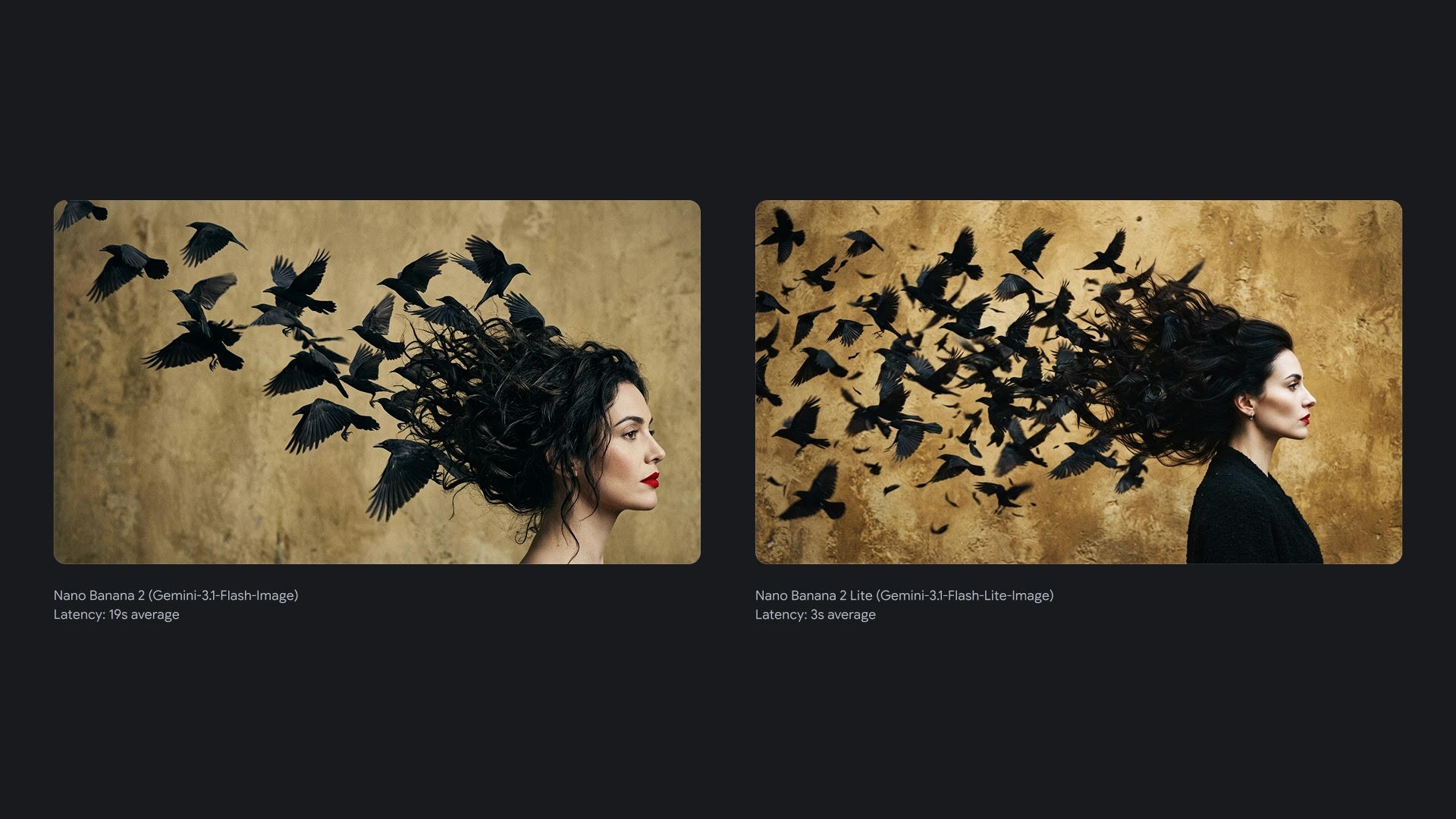
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog