Blog
Robótica & RL
Improvement of Robot's Simultaneous Localization and Mapping Using an Effective Transformation to Achieve Linear Model
arXiv:2606.28475v1 Announce Type: new Abstract: Nowadays mobile robots have wide engineering applications. Simultaneous localization and mapping (SLAM) is an important task of these robots. The major and common algorithms used for this task are based on extended Kalman filter (EKF). One of the main problems in EKF-based SLAM is its divergence. The nonlinearity of motion and observation models and linearization error are the main reasons for the divergence. There have been some efforts to address...
arXiv cs.RO
·Seyed Farzad Bahreinian, Maziar Palhang, Mohammad Reza Taban, Hasan Enami Eraghi
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
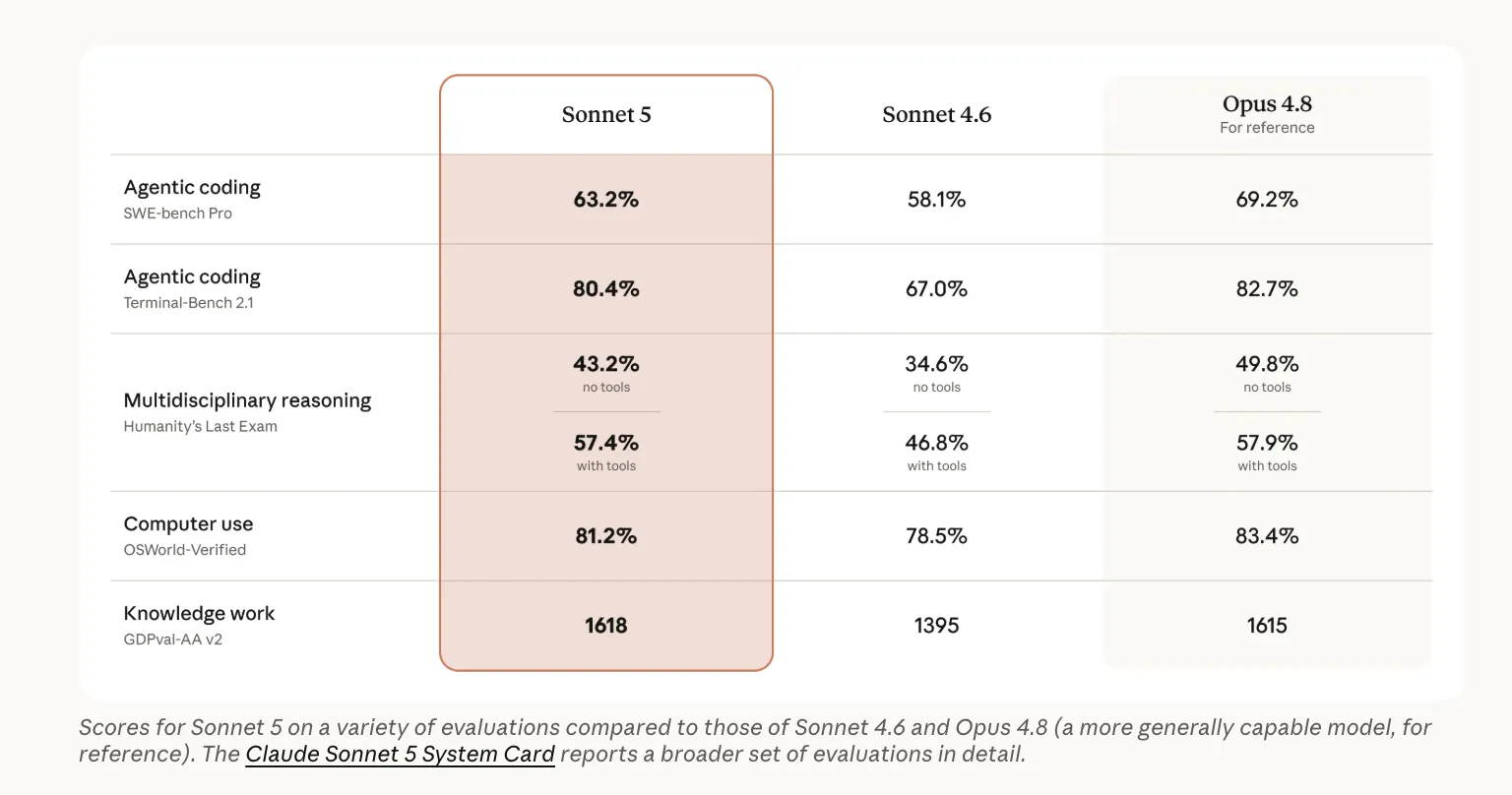
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
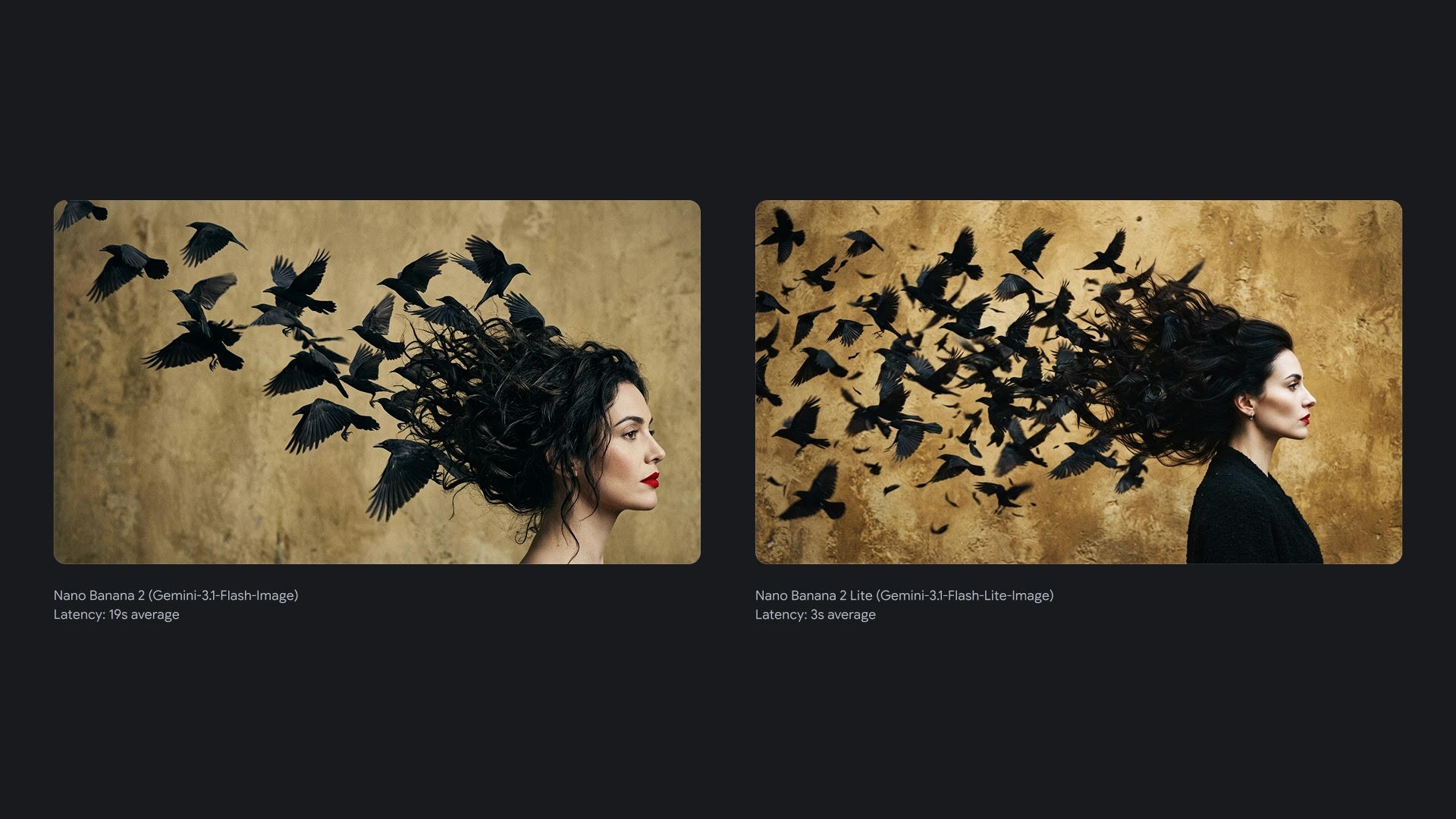
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog