Blog
Robótica & RL
Human2Any: Human-to-Robot Transfer via Constraint-Aware Compositional Planning
arXiv:2606.28813v1 Announce Type: new Abstract: Human videos are a scalable source of supervision for robot manipulation, as they are abundant and naturally capture rich object interactions. However, transferring human demonstrations to robots remains challenging due to embodiment mismatch, scene variation, and robot-specific feasibility constraints. We present Human2Any, a framework for learning reusable object-centric interaction priors from human videos without requiring real-world robot demo...
arXiv cs.RO
·Shuo Cheng, Chuye Zhang, Alfred Cueva, Caelan Garrett, Ajay Mandlekar, Danfei Xu
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
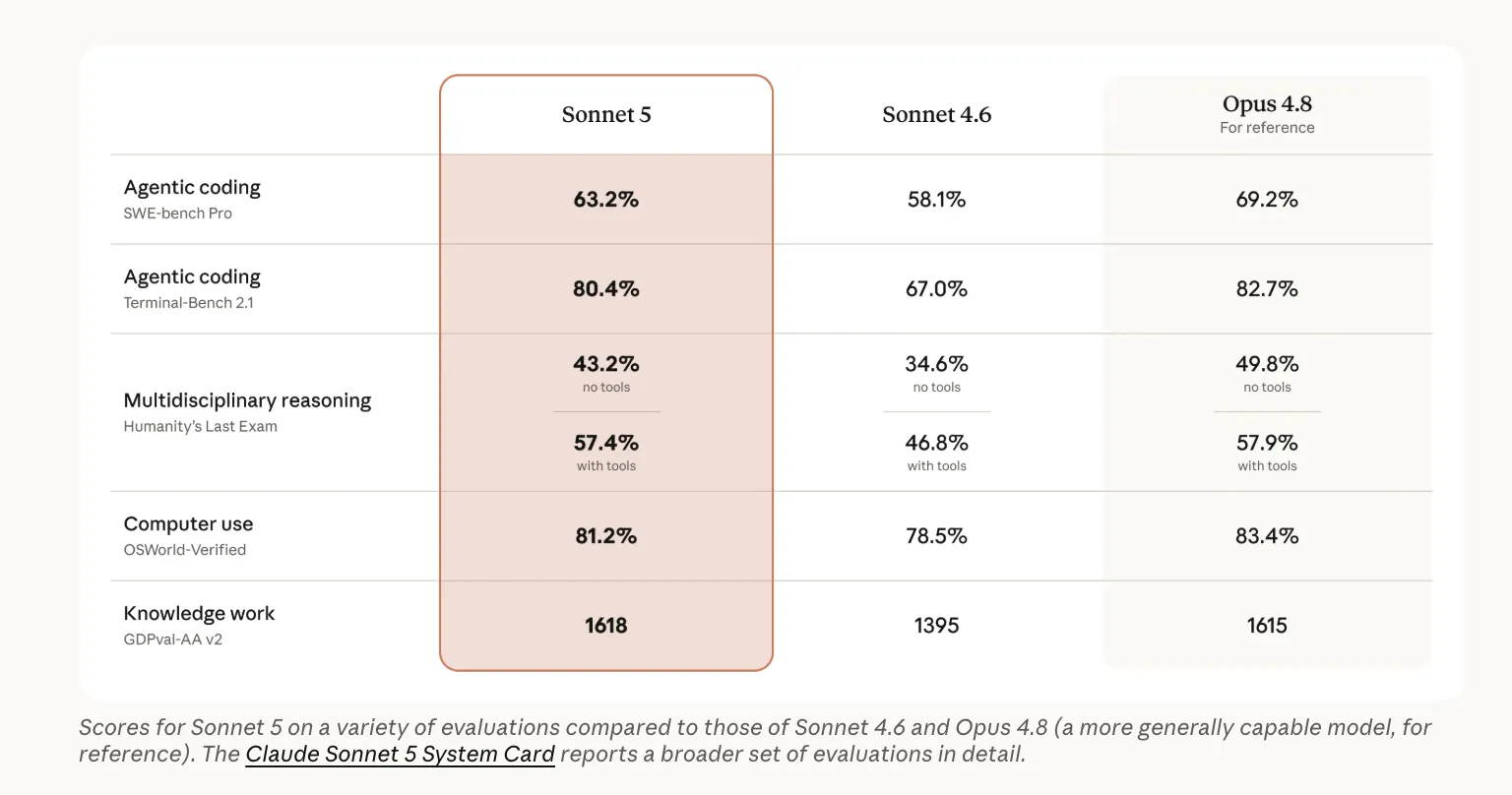
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
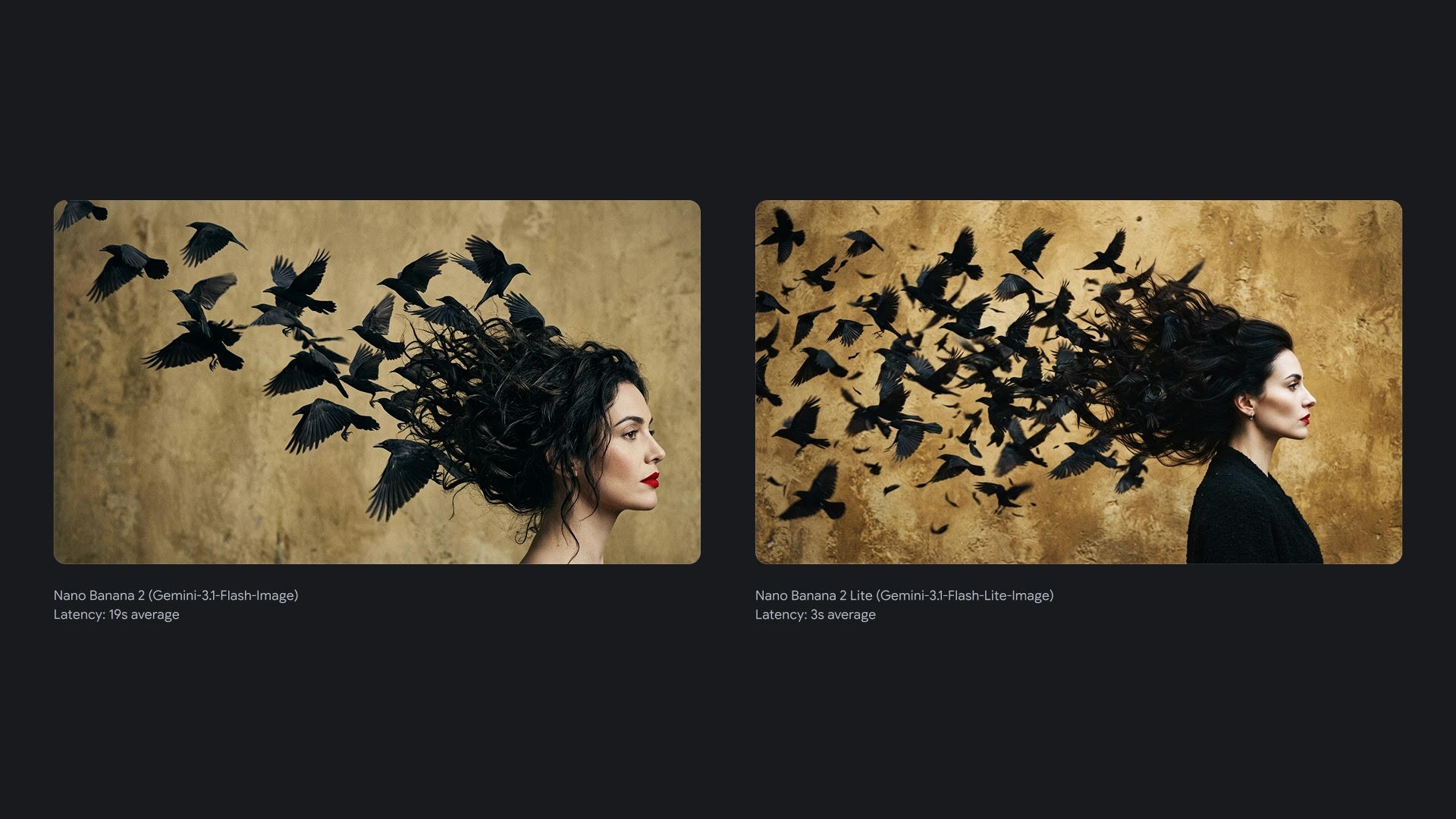
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog