Blog
Robótica & RL
HJ-SafeDMP: Hamilton-Jacobi Reachability-Guided Dynamic Movement Primitives for Provably Safe Robot Motion
arXiv:2606.28995v1 Announce Type: new Abstract: Robots deployed in safety-critical environments must execute motions that are simultaneously robust to disturbances and provably safe from collisions. Dynamic Movement Primitives (DMPs) offer inherent stability, temporal flexibility, and efficient trajectory generalization from single demonstrations, but they lack formal safety certificates. Conversely, Hamilton-Jacobi (HJ) Reachability analysis provides a principled framework for computing worst-c...
arXiv cs.RO
·Siddhanth Ramesh, Ravi Prakash
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
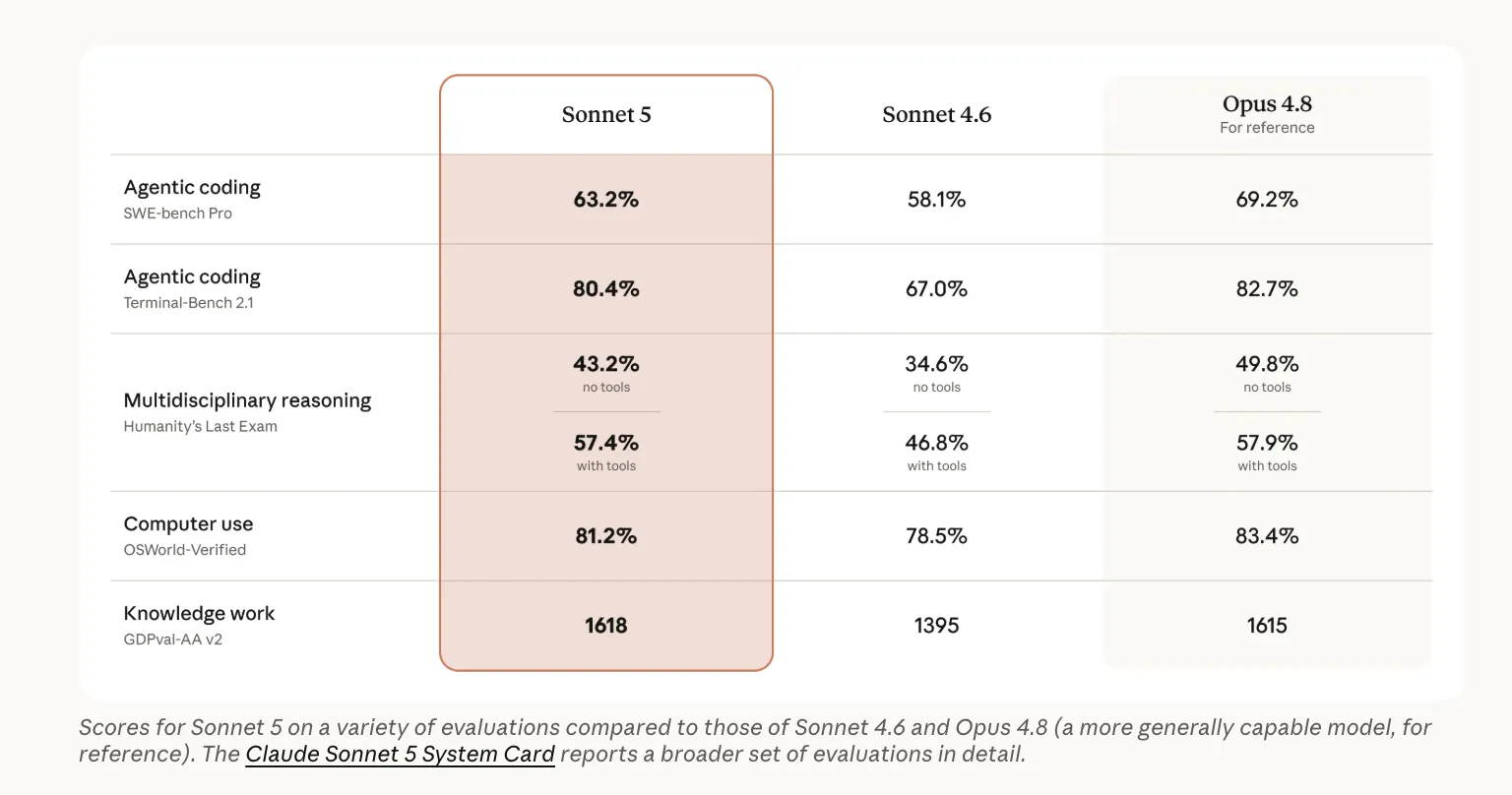
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
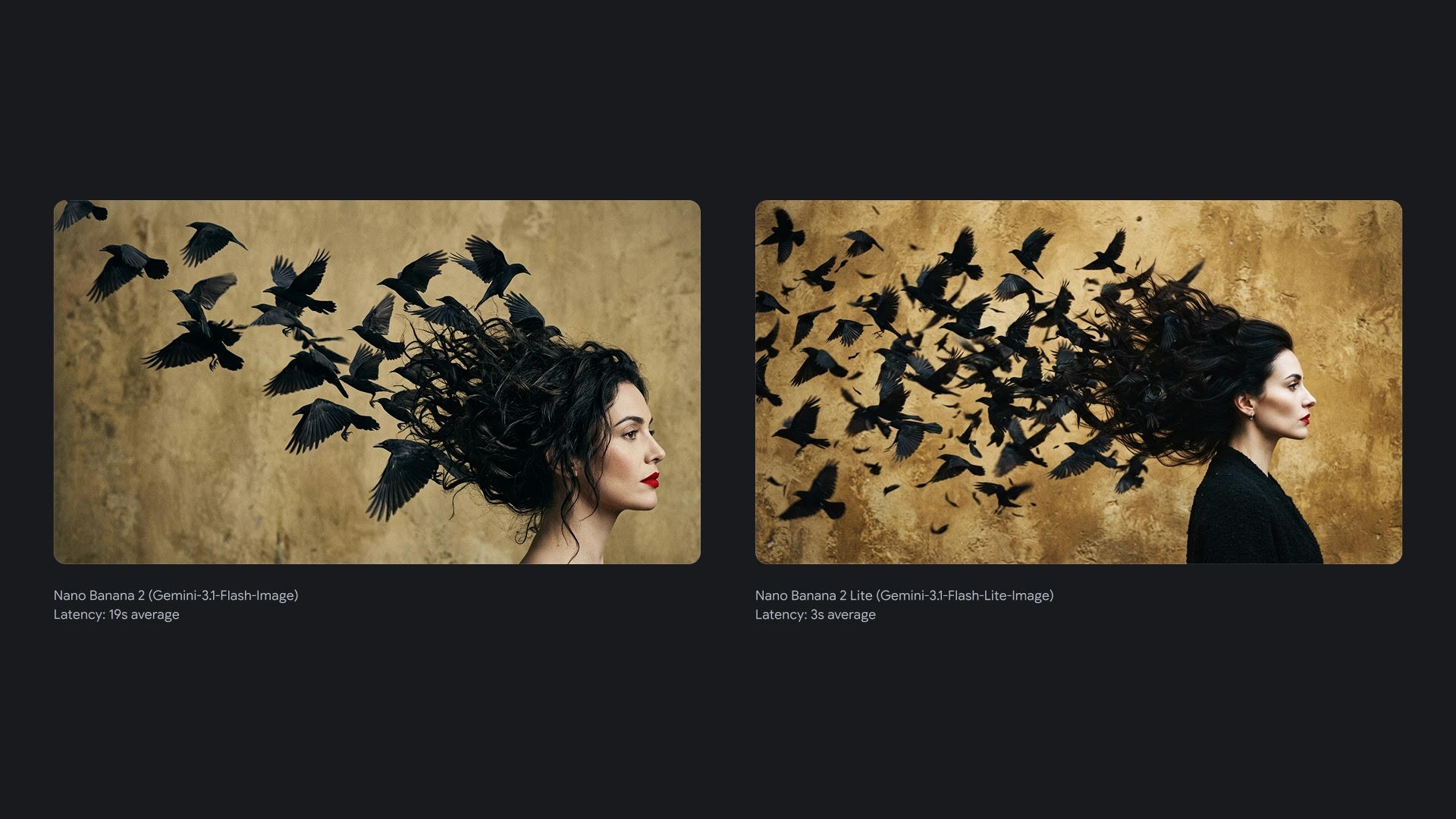
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog