Blog
Robótica & RL
Empowering a Single-Frequency GNSS Receiver to Achieve High-Precision Positioning with Relative Observations
arXiv:2606.29192v1 Announce Type: new Abstract: Global Navigation Satellite System (GNSS) navigation is widely used to provide absolute, outdoor positioning in field robotics. Advances in Real-Time Kinematic (RTK) technology can achieve centimeter-level accuracy, facilitating autonomous navigation tasks. However, the cost and extra infrastructure used for RTK still hinder the application and more cost-effective solutions are desired. In this letter, we present a novel tightly-coupled state estim...
arXiv cs.RO
·Xingpeng Wang, Ziwen Qu, Juncheng Chen, Ruitian Pang, Xiangyu Li, Tiancheng Lai, Siqi Shen, Wentao Liu, Pengfei Wang, Chao Xu, Yanjun Cao
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
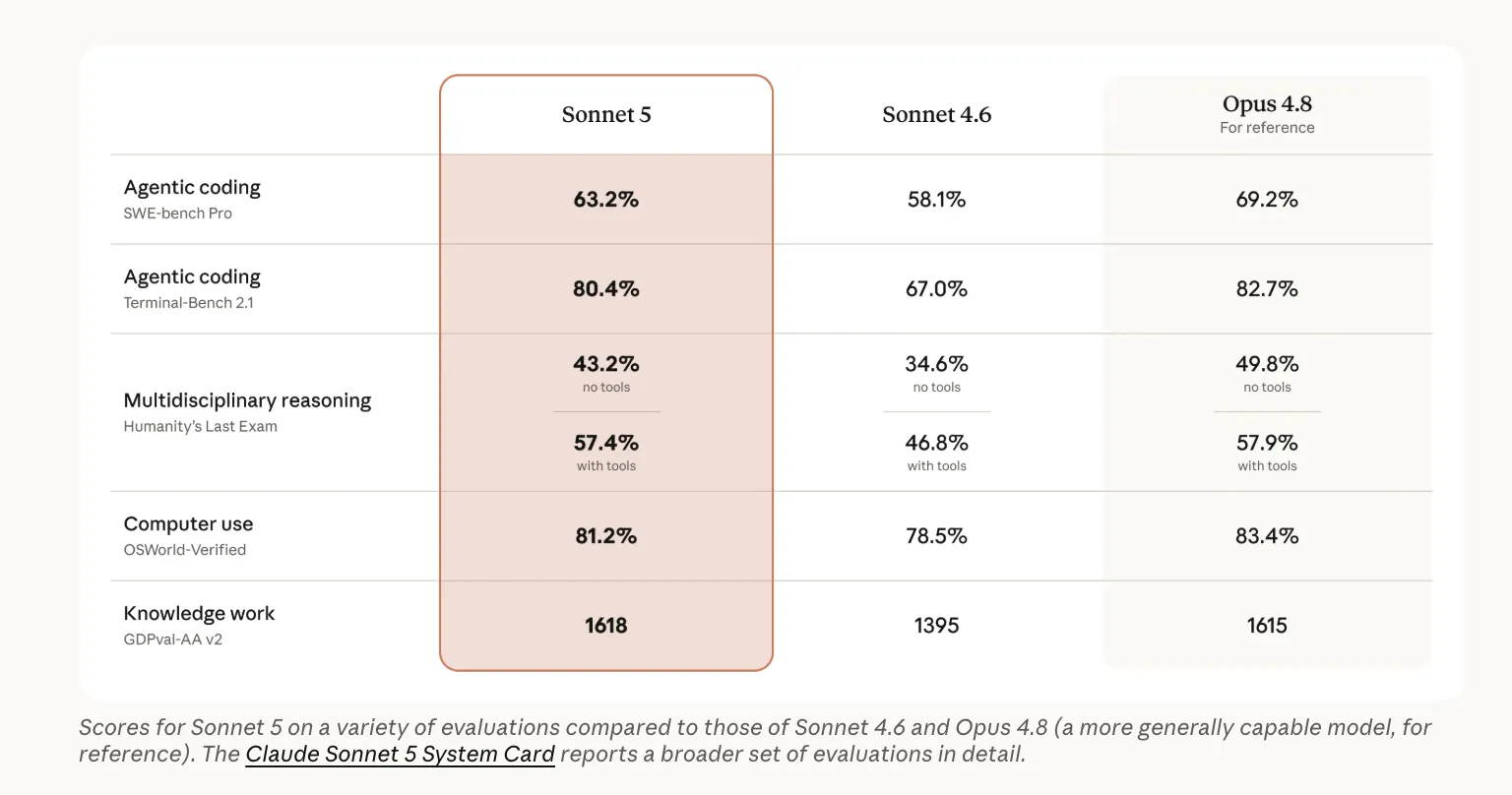
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
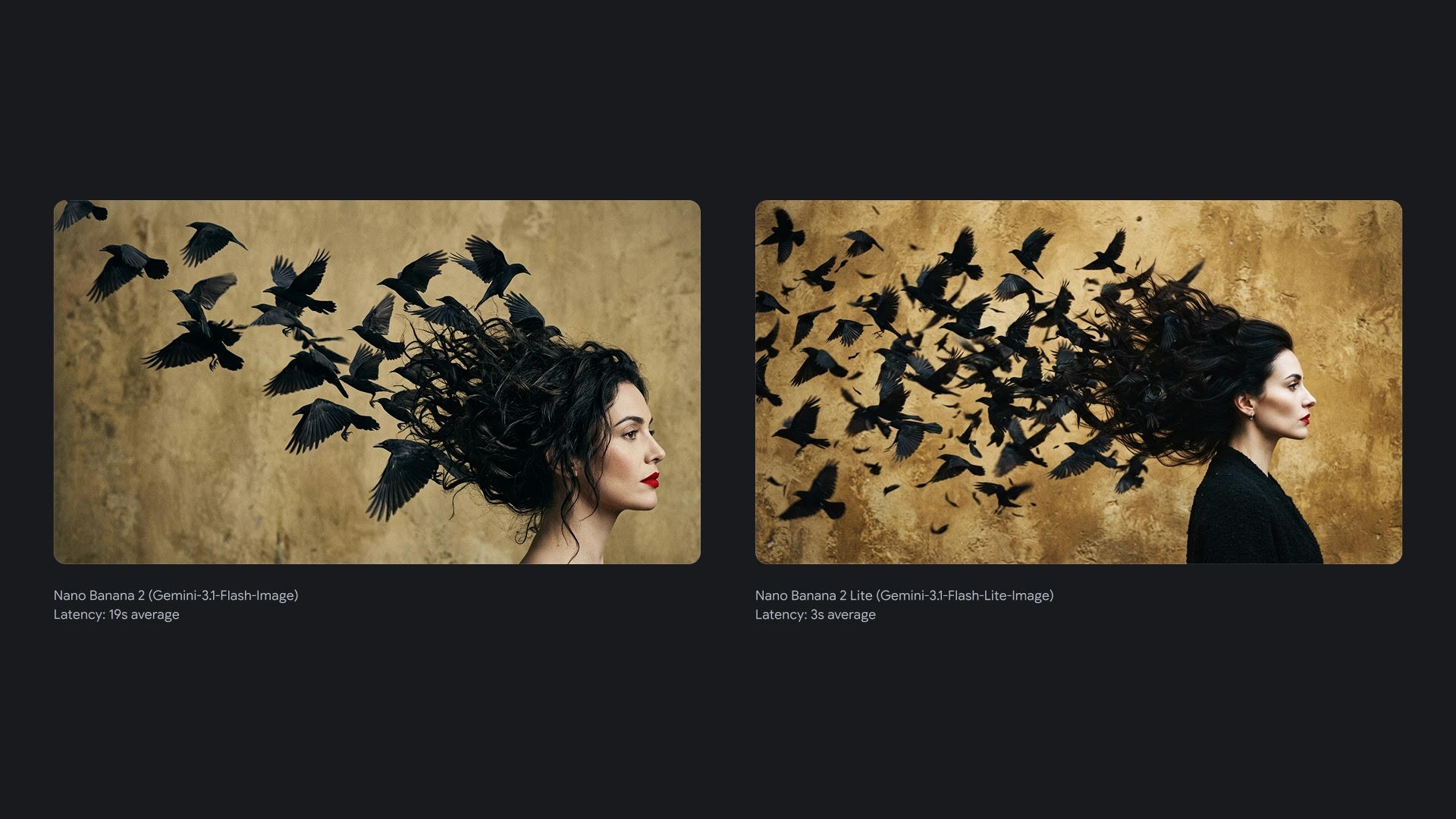
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog