Blog
Robótica & RL
A Unified Framework for Multi-Contact Path Planning in the Rolling Robot Systems
arXiv:2606.29065v1 Announce Type: new Abstract: Rolling motion planning is challenging because rolling contact imposes nonholonomic constraints and the configuration evolves on a curved manifold. The problem becomes substantially harder in multi-contact settings, where multiple bodies roll without slip and the contact states are coupled. This paper presents a new framework for multi-contact path planning in spherical rolling robotics under no-slip constraints. We first derive a compact kinematic...
arXiv cs.RO
·Qing Yu, Mikhail Svinin, Seyed Amir Tafrishi
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
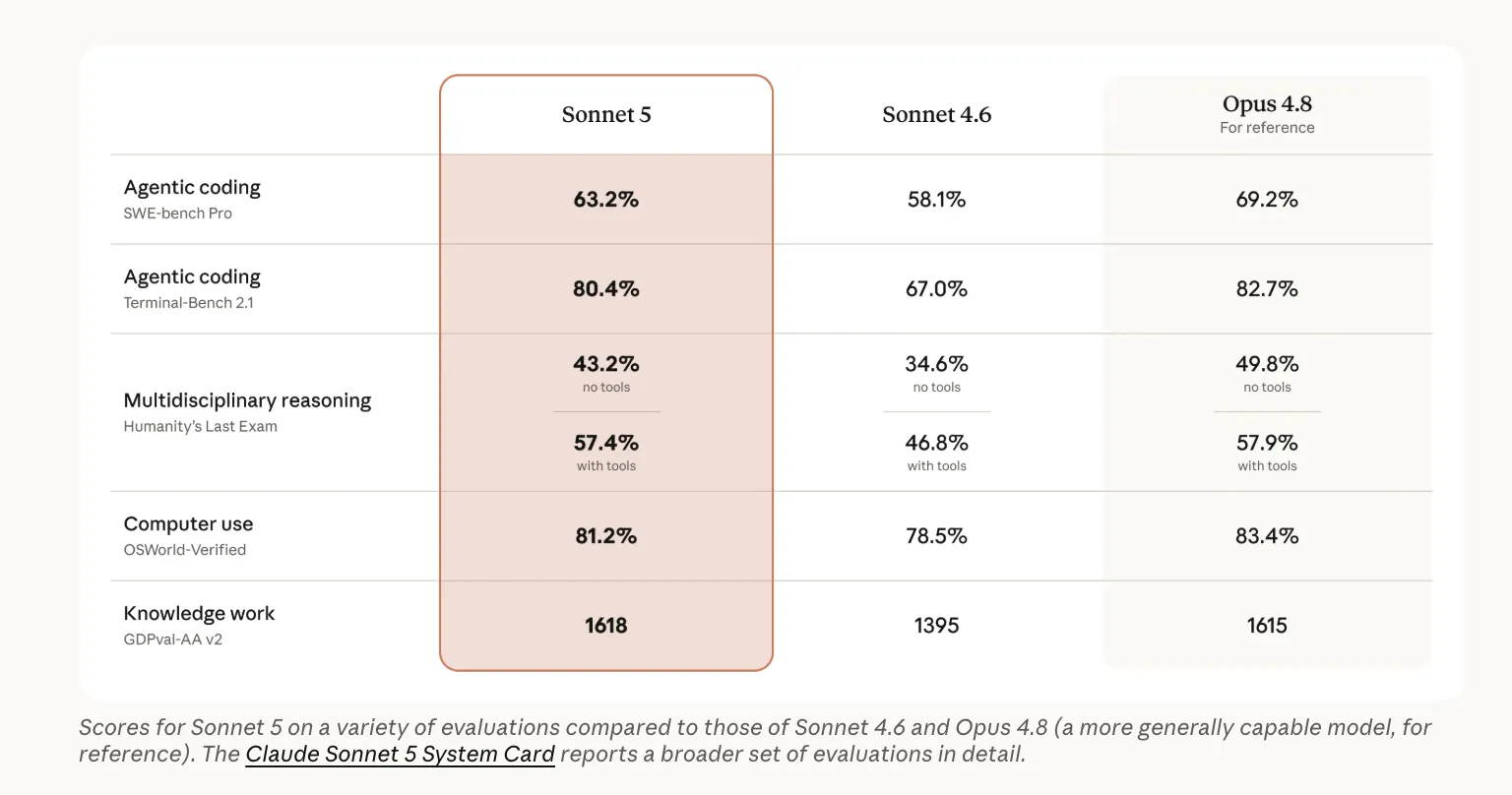
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
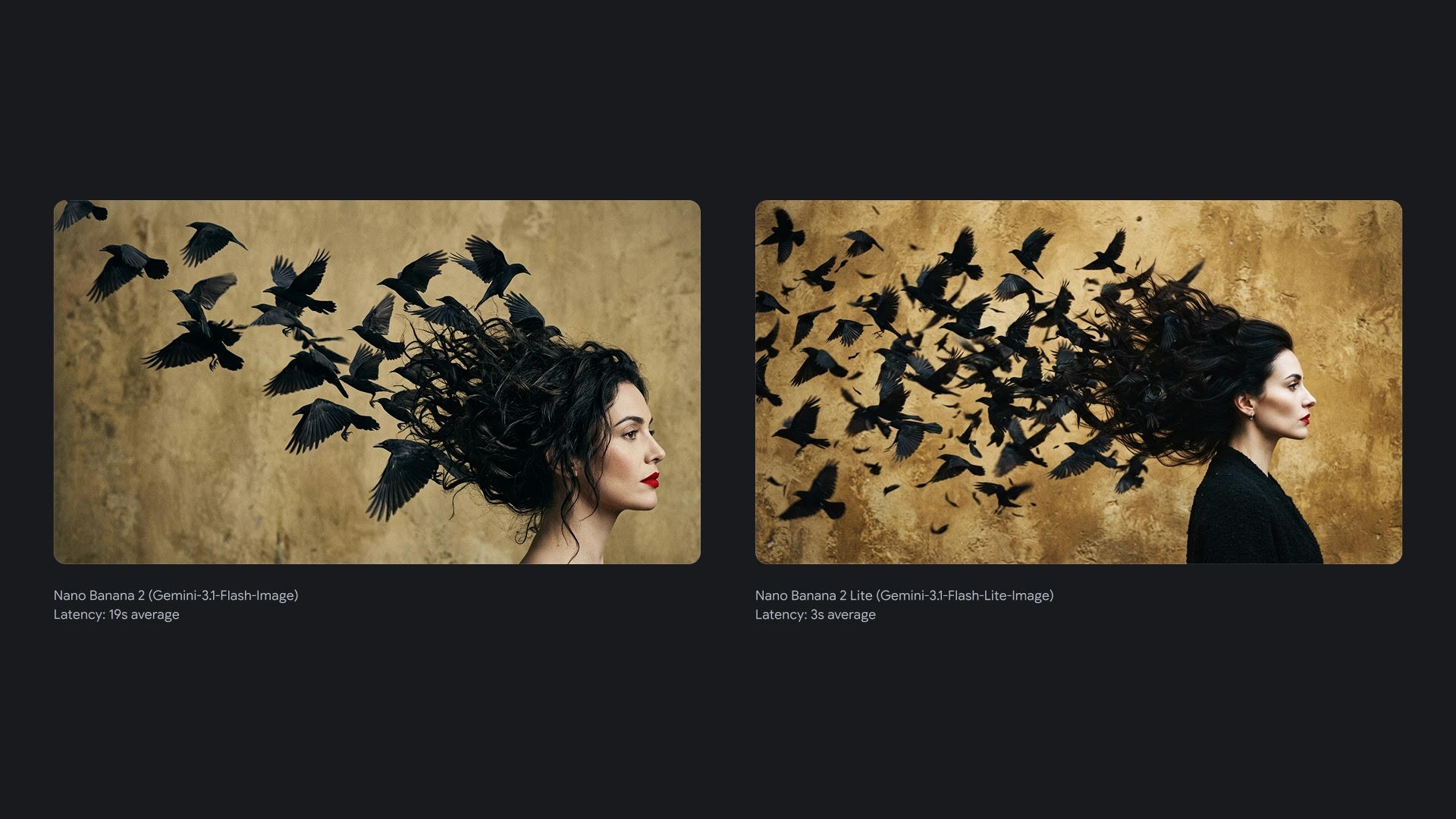
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog