Blog
Robótica & RL
A Path-Space Formulation of Prediction in World Models: From a Single Action to Prediction, Planning, and Irreversibility
arXiv:2606.28751v1 Announce Type: new Abstract: We propose a path-space formulation of prediction in AI world models. Rather than sequences of one-step conditional distributions, we argue that a world model implicitly defines a probability measure over future trajectories. In the local regime where latent dynamics admit an effective Markovian description, this path measure takes the Onsager-Machlup form. Within this framework, prediction (most probable trajectory), planning (constrained optimiza...
arXiv cs.LG
·Gunn Kim
·
// relacionados
Leia também
Blog
Linq’s iMessage Apps Bring Payments, Tickets, Flights, and Games Into the iMessage Bubble Through the imessage_app Part
Blog
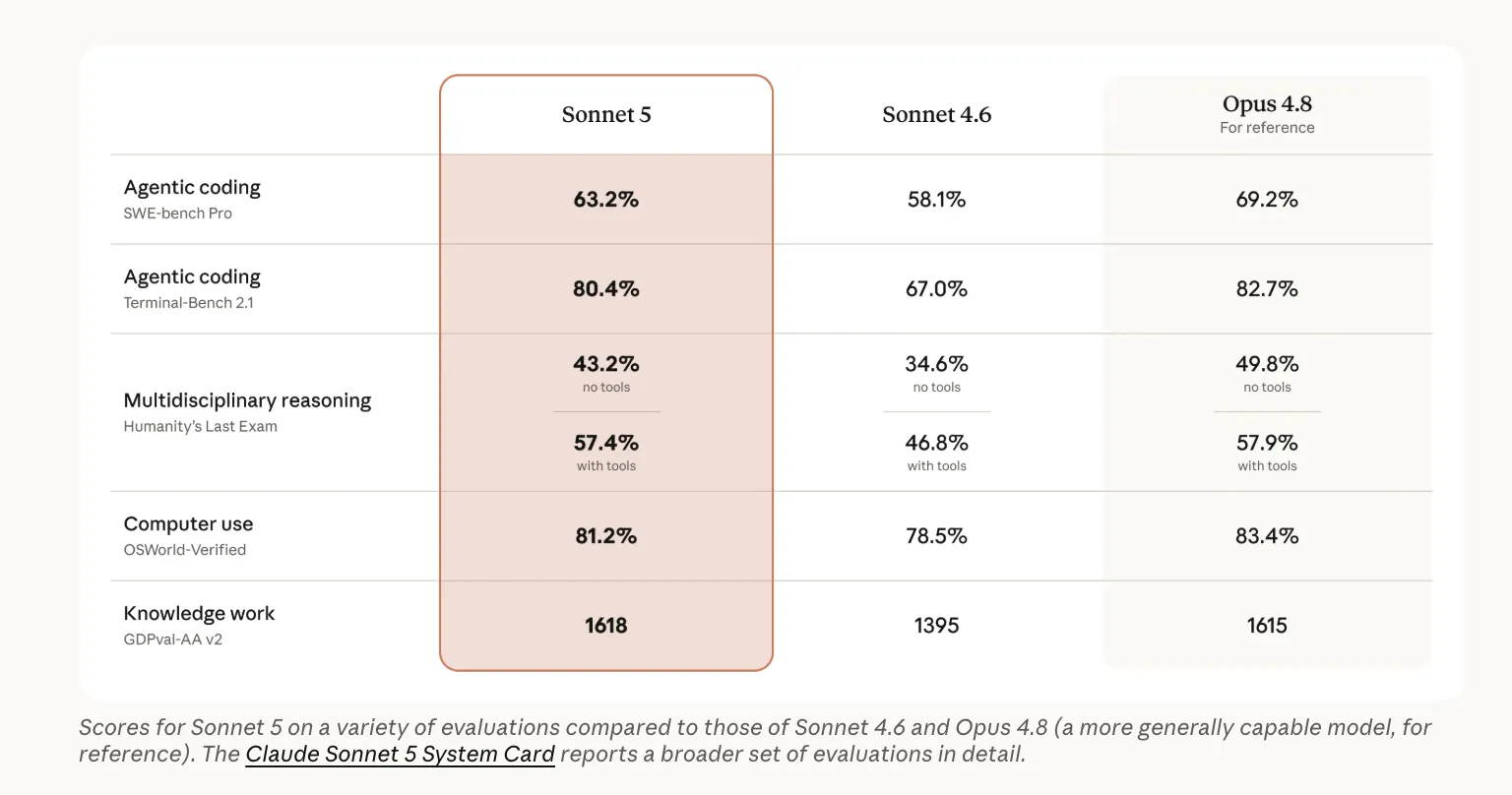
Anthropic Claude Sonnet 5 vs Sonnet 4.6 vs Opus 4.8: Agentic Coding Benchmarks, API Pricing, and Cost-Performance Tradeoffs Compared
Blog
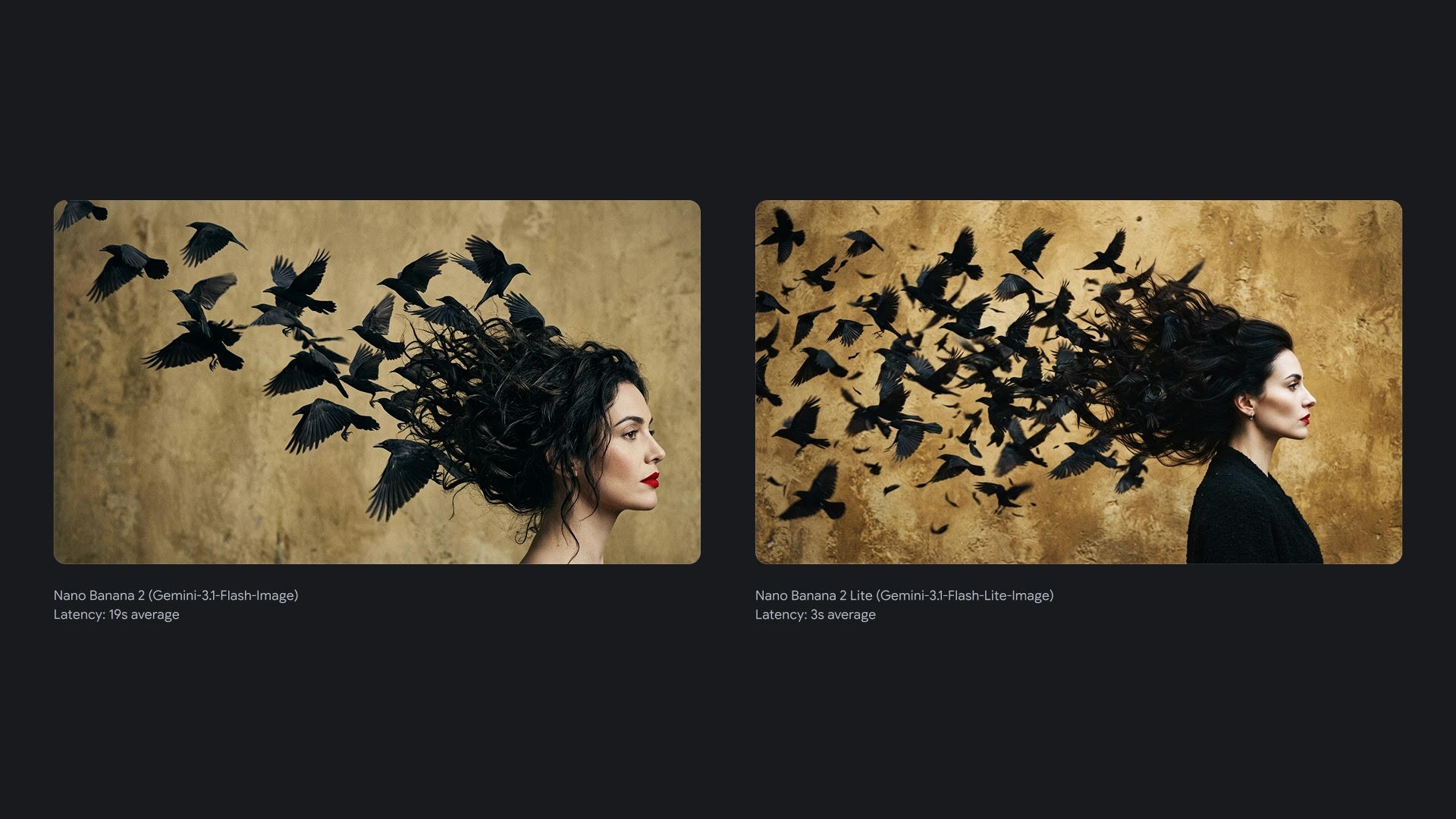
Google's new Nano Banana 2 Lite image model is its fastest and cheapest yet
Blog